Publicado por Oscar Gonzalez
en RobĂłtica
el 29/12/2022
Publicado por Oscar Gonzalez
en RobĂłtica
el 29/12/2022
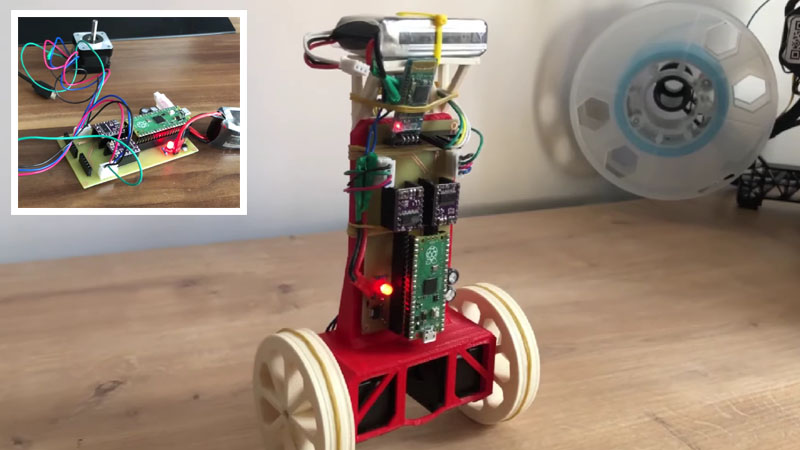
No es ni el primero ni el último robot balanceador que he publicado aquí y la verdad es que es un proyecto intermedio y muy vistoso una vez que lo ves funcionando.
Estos robots miden la inclinación con un acelerómetro y mediante un control PID mueven los motores que a su vez tienen encoders para saber su posición exacta. Lo puedes hacer con motores DC convencionales, pero es mucho más cómodo hacerlo con motores paso a paso como el que te dejo a continuación, ya que no necesitas los encoders, asumiendo que están en la posición correcta.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 27/12/2022
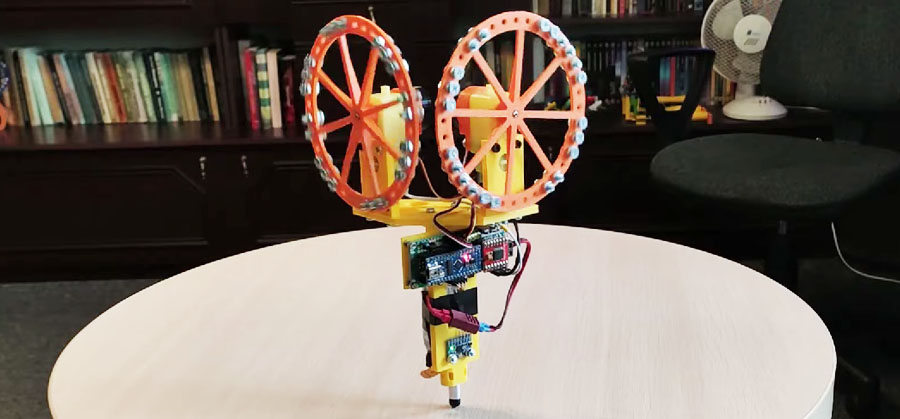
Éste robot es Open Source y se monta con componentes electrónicos baratos. Además, las piezas se imprimen en 3D y utiliza motores DC Dagu que son muy económicos, junto a un Arduino Nano. Con la ayuda de un sensor de inclinación, el resultado es un robot que consigue estar en equilibrio sobre una sola pata.
Es un excelente proyecto para aprender más sobre los sistemas de bucle cerrado y el control PID. Además, toda la documentación está disponible en Github y las piezas en Thingiverse por si quieres montarlo tu mismo.
Te dejo el vídeo y los enlaces a continuación...
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 01/06/2022
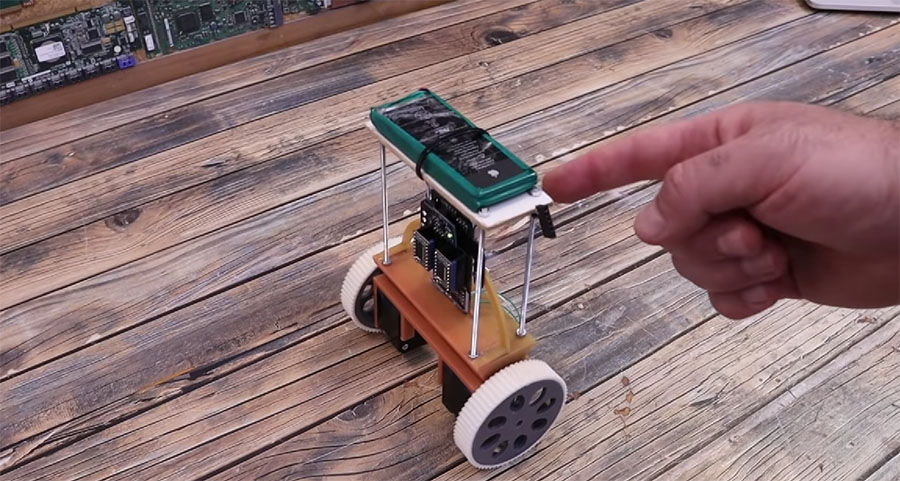
También se llaman robots balancines y su características principal es que solo tienen dos ruedas y pueden mantenerse en equilibrio sobre ellas. A nivel teórico, funcionan como un péndulo invertido y gracias a un Arduino junto con una unidad de medición inercial MPU-6050, se puede construir un robot de éste tipo de forma muy barata y sencilla.
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 12/04/2021
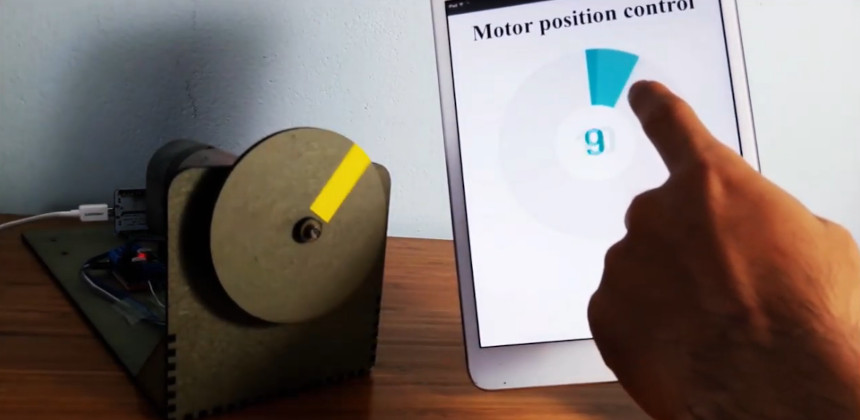
Si quieres posicionar un motor, tienes varias opciones como por ejemplo utilizar un servomotor o incluso un motor paso a paso. En el primer caso como el servomotor, es una opción barata pero tiene sus limitaciones como el ángulo máximo de rotación. Con los motores paso a paso puedes incluso girar continuamente y no tienes ese problema, pero es ya una solución más cara y que requiere de controladores específicos. Un buen sistema para eso es utilizar un motor DC de toda la vida, de esos que le meter corriente y gira. Si a ese motor le añades un encoder para conocer su posición y junto a buen control PID con Arduino, puedes hacer que se posicione de una forma muy fácil como se explica en el vídeo que te dejo a continuación.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 20/05/2020
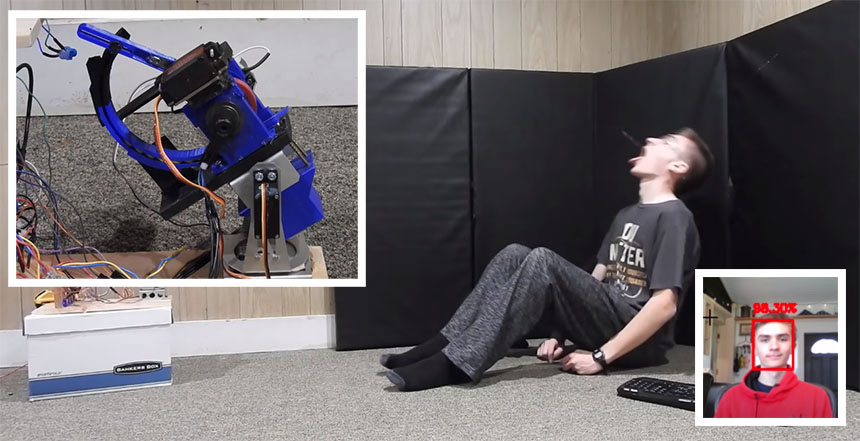
A pesar de que el título de éste post puede ser un poco grande, creo que describe perfectamente el tipo de proyectos que me gustan. Estoy hablando del Over Engineering o eso de cuando un proyecto se te va de las manos y una tarea en principio sencilla se convierte en una obra faraónica y consigue que la diversión por terminar el proyecto sea directamente proporcional (es más divertido hacer algo complejo que algo demasiado sencillo). Aquí el tema se trataba de una torreta para lanzar caramelos M&M. Hasta ahora bien, pero además es capaz de controlar la parábola que traza el pequeño caramelo mediante inclinación y velocidad regulada con la ayuda de un PID. Pero por qué parar aquí si además se le puede añadir una cámara para que reconozca la cara del objetivo y pueda ajustarse automáticamente. Pero si quieres forzar todavía más la máquina, aun queda controlar todo el conjunto con Amazon Alexa y ya lo bordas! :) No os perdáis el vídeo a continuación que no tiene desperdicio.
Leer más