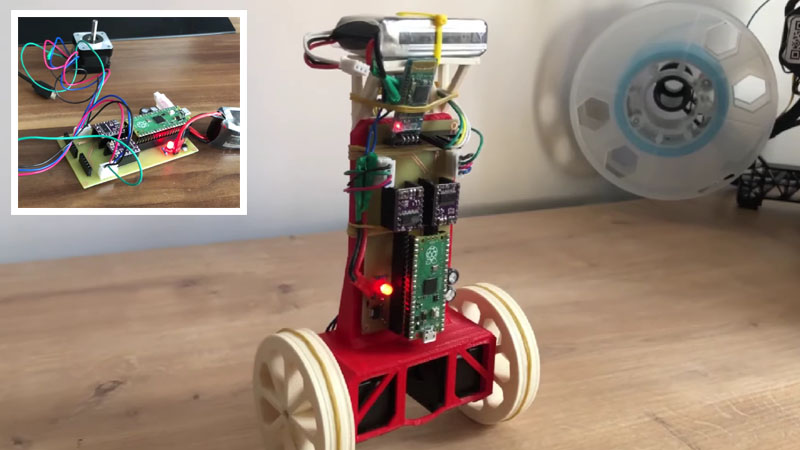
Un robot balanceador con Raspberry Pi Pico y motores paso a paso
Publicado por Oscar Gonzalez
en RobĂłtica
el 29/12/2022
No es ni el primero ni el último robot balanceador que he publicado aquí y la verdad es que es un proyecto intermedio y muy vistoso una vez que lo ves funcionando.
Estos robots miden la inclinación con un acelerómetro y mediante un control PID mueven los motores que a su vez tienen encoders para saber su posición exacta. Lo puedes hacer con motores DC convencionales, pero es mucho más cómodo hacerlo con motores paso a paso como el que te dejo a continuación, ya que no necesitas los encoders, asumiendo que están en la posición correcta.
