Publicado por Oscar Gonzalez
en RobĂłtica
el 29/12/2022
Publicado por Oscar Gonzalez
en RobĂłtica
el 29/12/2022
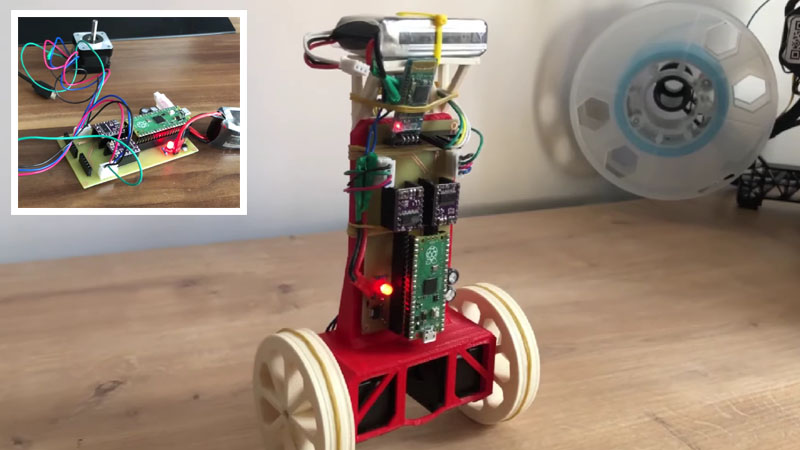
No es ni el primero ni el último robot balanceador que he publicado aquí y la verdad es que es un proyecto intermedio y muy vistoso una vez que lo ves funcionando.
Estos robots miden la inclinación con un acelerómetro y mediante un control PID mueven los motores que a su vez tienen encoders para saber su posición exacta. Lo puedes hacer con motores DC convencionales, pero es mucho más cómodo hacerlo con motores paso a paso como el que te dejo a continuación, ya que no necesitas los encoders, asumiendo que están en la posición correcta.
Leer más
Publicado por Oscar Gonzalez
en DIY
el 04/10/2022
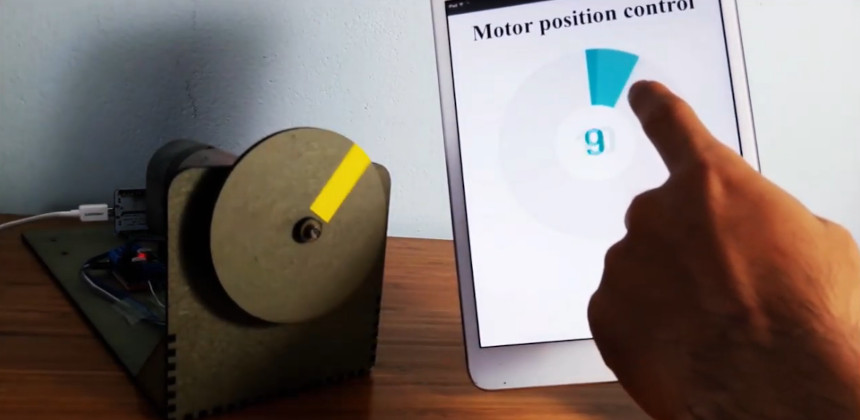
Antes de que leas esto o veas el vídeo, tengo que advertirte de que una vez que veas cómo funciona, inmediatamente vas a necesitar uno. Éste potenciómetro encoder es tan bueno que verás en él todo tipo de aplicaciones prácticas para casi cualquier cosa.
La idea es realmente muy simple y espectacular a la vez. Se trata de un potenciómetro que funciona mediante un pequeño motor sin escobillas montado sobre un encoder magnético. Además tiene una pantalla LCD redonda que actúa como visor y pulsador cuando la presionas.
Hasta aquí todo normal, pero la magia ocurre a nivel de software ya que el motor controla cómo reacciona el encoder y eso se puede sentir en el tacto. Eso quiere decir que el motor puede ofrecer resistencia variable en función del modo en el que está funcionando y permite cosas tan alucinantes como sentir pequeños "toques" como si fuesen dientes de un encoder real. O incluso definir un punto de inicio y otro de fin y al llegar a ambos extremos el motor ofrecer resistencia y actuar como un muelle para hacerlo volver a su sitio.
Es realmente impresionante y es difícil que te lo explique sin que veas el vídeo que te dejo a continuación...
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 12/04/2021
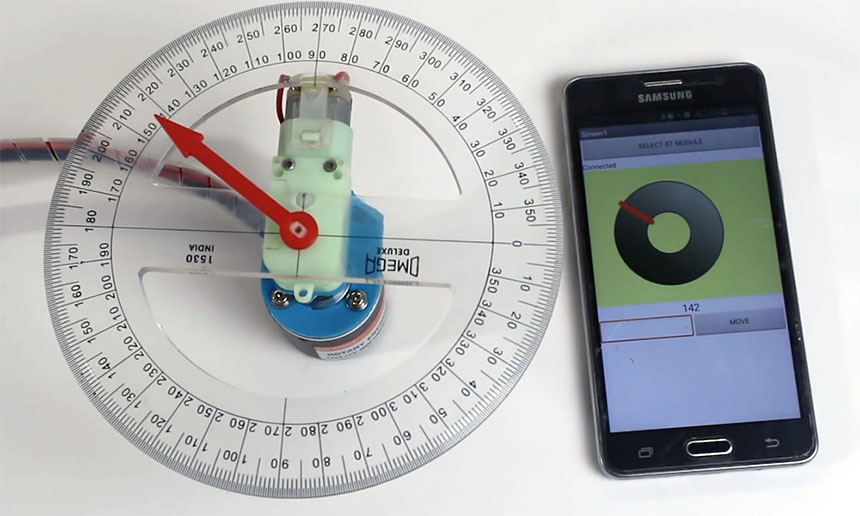
Si quieres posicionar un motor, tienes varias opciones como por ejemplo utilizar un servomotor o incluso un motor paso a paso. En el primer caso como el servomotor, es una opción barata pero tiene sus limitaciones como el ángulo máximo de rotación. Con los motores paso a paso puedes incluso girar continuamente y no tienes ese problema, pero es ya una solución más cara y que requiere de controladores específicos. Un buen sistema para eso es utilizar un motor DC de toda la vida, de esos que le meter corriente y gira. Si a ese motor le añades un encoder para conocer su posición y junto a buen control PID con Arduino, puedes hacer que se posicione de una forma muy fácil como se explica en el vídeo que te dejo a continuación.
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 11/12/2018
Controlar un motor DC de forma precisa no es una tarea fácil, pero gracias al algoritmo PID junto con un encoder, se puede conseguir una precisión muy buena. En el vídeo que os dejo a continuación se explica cómo hacer un sencillo proyecto usando PID con Arduino moviendo un pequeño motor.
Leer más
Los potenciómetros encoder o Rotary Encoders son extremadamente últiles en cualquier proyecto. Permiten incrementar o decrementar un contador de manera que un usuario puede darle vueltas para un lado o para el otro sin límite. El funcionamiento de éstos encoder es bien sencillo y puede hacerse de muchas manera. Una de las mejores formas es utilizando interrupciones, que es lo que muestras éste pequeño tutorial para microcontroladores PIC.
Os dejo el enlace a continuación...
Leer más