Publicado por Oscar Gonzalez
en Robótica
el 11/07/2024
Publicado por Oscar Gonzalez
en Robótica
el 11/07/2024
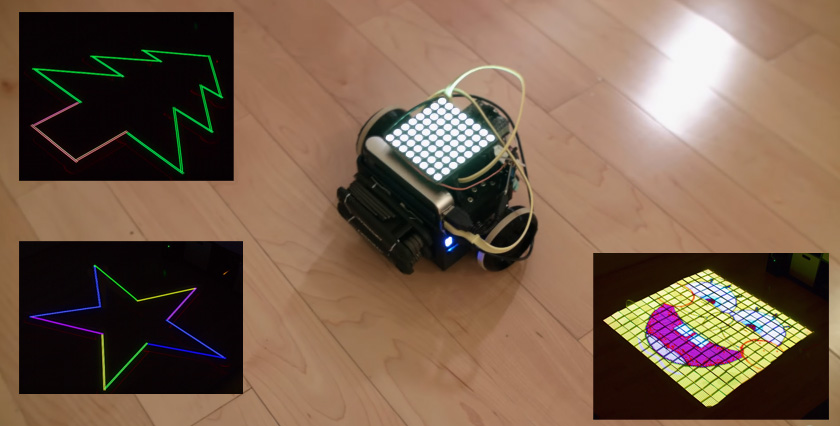
El Light Painting consiste en sacar una foto con una exposición muy larga y de esa forma se pueden realizar dibujos con luz. Ahora es cuando implosiona tu cabeza al aplicar ésto mismo a un pequeño robot. Con una matriz de LED RGB montada sobre su lomo y programando los movimientos correctos, el pequeño robot es capaz de dibujar formas o incluso imágenes completas a todo color. Que sepas que la matriz de LED es ésta y si tienes un Escornabot a mano ya ni te cuento... ahí lo dejo Pablito y lo sabes ;)
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 21/06/2024
El MX-Phoenix es impresionante y enorme un robot hexápodo basado en 6 potentes servos Dynamixel MX-64T y 12 servos MX-106T. Es una evolución de otro robot hexápodo de Lynkxmotion pero éste está controlado por una placa Teensy 3.6, muy necesaria para realizar la tremenda cantidad de cáculos que hay que realizar para mover éste tipo de robots. En el vídeo que os dejo a continuación, se puede ver la excelente suavidad de movimiento que ha conseguido su autor y también el tamaño del robot que precisamente no es pequeño. aunque parezca que no, todo el cuerpo y las patas están impresas en 3D con ABS. Con un tratamiento con acetona, el acabado es excelente.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 05/06/2024
Hace poco hablaba por aquí del brazo robot llamado Walter que hizo Jochen Alt y hoy os dejo otro de sus impresionantes proyectos que me parece realmente espectacular. Se llama Luci y es la famosa lámpara de Pixar pero que funciona de verdad.
A nivel mecánico utiliza potentes servomotores ayudados por muelles pero lo grueso del asunto está en el uso de una placa Linux ODROID que permite realizar cálculos de cinemática inversa. De esta forma puede realizar movimientos muy orgánicos y suaves mientras... ¡detecta la cara de quien se le pone delante!
Efectivamente, tiene una pequeña cámara web que mediante OpenCV reconoce la cara y la sigue. Además Jochen ha añadido algo de personalidad a la lámpara con algunos movimientos simpáticos.
El código fuente está en github (la explicación e implementación de toda la cinemática y curvas de Bezier es exquisita) y podéis ver los detalles del proyecto en su web, pero también os dejo un vídeo a continuación para que se os suba el SAV hasta la estratosfera ;) ¿Quién se anima a montarlo?
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 20/05/2024
De por sí, los brazos robot molan mucho y particularmente me gustan mucho los SCARA ya que pueden ser muy rápidos y cargar con bastante peso con un diseño relativamente sencillo. Pero si además de eso le añadimos un cuerpo o chasis hecho totalmente en madera tratada como el que os dejo a continuación, ya queda una cosa totalmente épica. Y no es simplemente unos tableros de madera cortados para montar el chasis, sino que una bonita manera de Acacia negra barnizada y brillante. No pretende ser el mejor brazo robot SCARA del mundo sino que orientarlo a la educación con éste tipo de robots. Su auto indica que liberará el diseño como Open Source pero por el momento quiere poner a la venta unas diez unidades que va a construir. Es un juguete caro sin duda, pero desde luego su belleza es asombrosa.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 18/05/2024
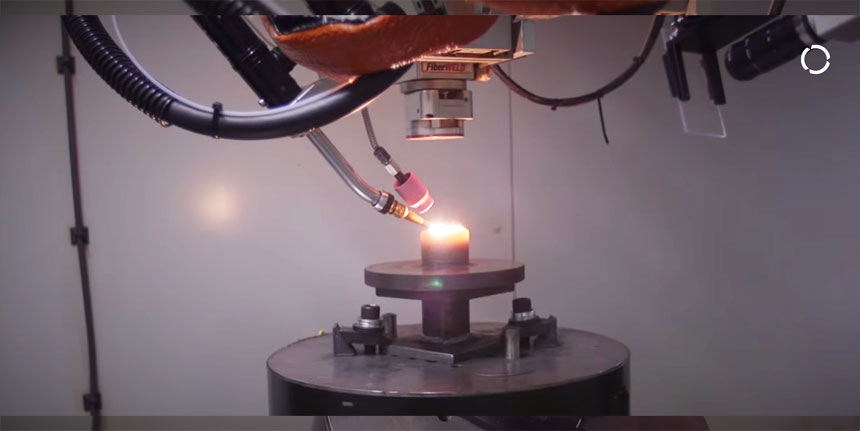
KUKA Robotics es bien conocida por sus robots industriales pero también es una empresa que siempre innova en diferentes campos como por ejemplo la impresión 3D. Recientemente ha publicado un vídeo donde muestra una nueva técnica de impresión 3D basada en la fundición de metal. Sigue siendo una tecnología de fabricación digital aditiva pero con las ventajas que ofrece utilizar metal en lugar de plástico. Desde luego la impresión 3D no está ni mucho menos estancada y seguro seguiremos siendo evolucionar ésta estupenda tecnología en los próximos años.
Leer más