Publicado por Oscar Gonzalez
en RobĂłtica
el 01/08/2019
Publicado por Oscar Gonzalez
en RobĂłtica
el 01/08/2019
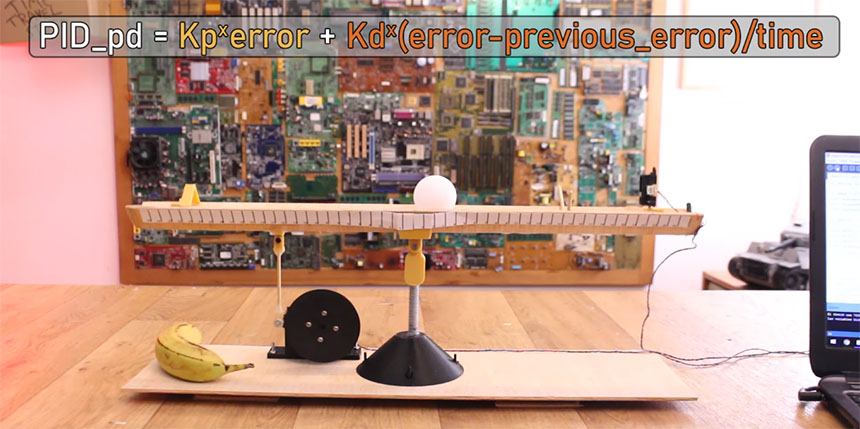
El control con realimentación PID es extremadamente útil y se usa en infinitas aplicaciones. En su esencia, calcula la desviación o error entre un valor medido y un valor deseado. Con esto se puede controlar de forma eficaz drones, robots sigue líneas o la temperatura de la cama caliente de tu impresora 3D por ejemplo. Se trata de un algoritmo con tres factores principales: Proporcional, Integral y Derivada. Que no cunda el pánico al leer sobre derivadas e integrales, ya que si entiendes bien cómo funciona el algoritmo PID, no te será complicado implementarlo en tu siguiente proyecto. En el vídeo que te dejo a continuación se muestra un ejemplo utilizando una bola de ping pong que debe mantenerse estable sobre una plataforma en movimiento. Ahora es cuando te das cuenta de que aquel primer año de la carrera de ingeniería haciendo derivadas en integrales como si no hubiese un mañana, por fin tiene sentido... ;)
ACTUALIZACIÓN: Gracias a David Pereira, os dejo también otro vídeo explicativo en Español sobre el funcionamiento del sistema PID con ejemplo práctico.
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 11/12/2018
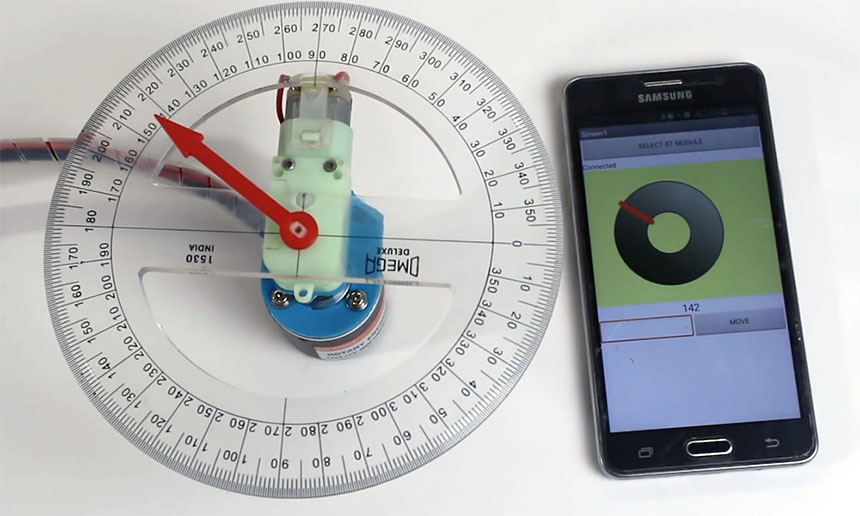
Controlar un motor DC de forma precisa no es una tarea fácil, pero gracias al algoritmo PID junto con un encoder, se puede conseguir una precisión muy buena. En el vídeo que os dejo a continuación se explica cómo hacer un sencillo proyecto usando PID con Arduino moviendo un pequeño motor.
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 13/06/2012
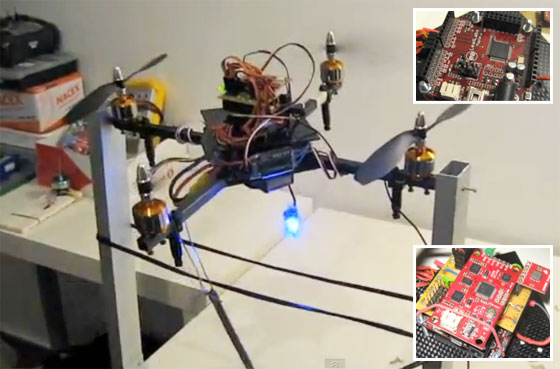
Nuestro amigo Xoan Carlos desde Gondomar nos comenta la finalización de su proyecto de Quadcopter casero. Es un impresionante aparado del que ya hemos hablado con anterioridad y que utiliza una placa Maple junto con una unidad de medición inercial RAZOR 9 DOF para su control. Las primeras pruebas de vuelo fueron muy satisfactorias y vuela realmente muy bien. Como siempre, el ajuste del PID lleva su tiempo pero Xoan ya está trabajando en una shield para montarlo todo de forma más sólida. Estupendo trabajo Xoan!
No os perdais más detalles a continación...
Leer más
Publicado por Andoni Diaz Puerta
en ElectrĂłnica
el 27/05/2012
Para todo aquél que haya hecho un proyecto sobre robótica, en el que se requiera un mínimo de estabilidad en el proceso, linealidad y el mínimo error posible, sabrá que no es una tarea fácil.
Como ya se ha hablado incontables veces en el blog, un PID es una solución evidente ante este problema, pero presenta un complejo de ajuste e implementación en nuestros códigos, que por suerte se suple con las numerosas librerías ya preparadas para estas tareas en nuestros entornos favoritos (Arduino, MBED, Maple...).
Recientemente he estado trabajando en un robot seguidor de lineas, en el cual he llegado a implementar el PID, todo para mi proyecto de final de curso y el resultado(sobre el cual hablaremos en otra ocasión), ha sido excelente, una mezcla explosiva entre eficiencia y velocidad.
En esta ocasión os mostraremos varios recursos para intentar comprender, ajustar y optimizar este excelente algoritmo!
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 30/01/2012
Xoan Carlos nos envía un vídeo de las primeras pruebas de equilibrio de un quadricoptero hecho con la placa Maple y el sistema de medición inercial 9DOF Razor IMU-AHRS. También incluye un sensor de presión barométrica BMP085 que servirá más adelante para el control de altitud. Hemos visto por aquí una infinidad de quadcopter con Arduino y la verdad es que me llama la atención que Xoan utiliza un a placa Maple dado que es bastante más potente que un Arduino. Seguiremos de cerca este proyecto del que seguro tendremos más noticias en breve. Enhorabuena xoan, excelente trabajo!
No os perdais el vídeo a continuación...
Leer más