Publicado por Oscar Gonzalez
en RobĂłtica
el 23/10/2019
Publicado por Oscar Gonzalez
en RobĂłtica
el 23/10/2019
Seguro ya conoces esas piezas de plástico de colores con la cuales con mucha paciencia puedes hacer pequeñas figuras o murales, pero es un proceso bastante tedioso. En el vídeo que os dejo a continuación podréis ver una increíble máquina que los clasifica, selecciona y coloca en el lugar exacto y cuando termina, calienta el conjunto para fusionarlo y dejarlo listo para decorar. Es una auténtica brutalidad y da gusto verla funcionar!
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 30/08/2019
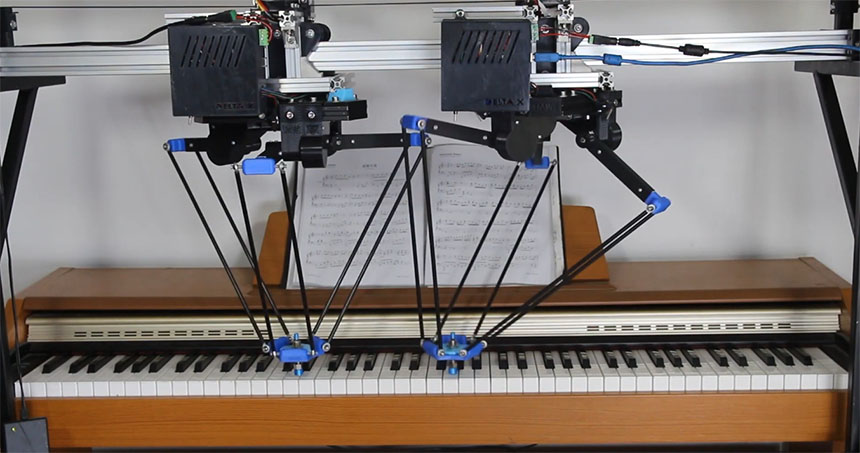
Seguro que los robots Delta te suenan de algunos tipos de impresoras 3D, pero son mucho más que eso ya que sirve para una gran variedad de aplicaciones en la industria y son extremadamente rápidos. El proyecto Delta X es un pequeño robot de tipo Delta Open Source basado en Arduino que puede ayudar a todo aquel que quiera profundizar en las aplicaciones industriales de los robots Delta como clasificación o recolectado de productos sobre una cinta. Saldrá en breve en Kickstarter pero en la web que os dejo en el enlace a continuación, ya se ofrecen muchos detalles por si quieres montarlo.
Leer más
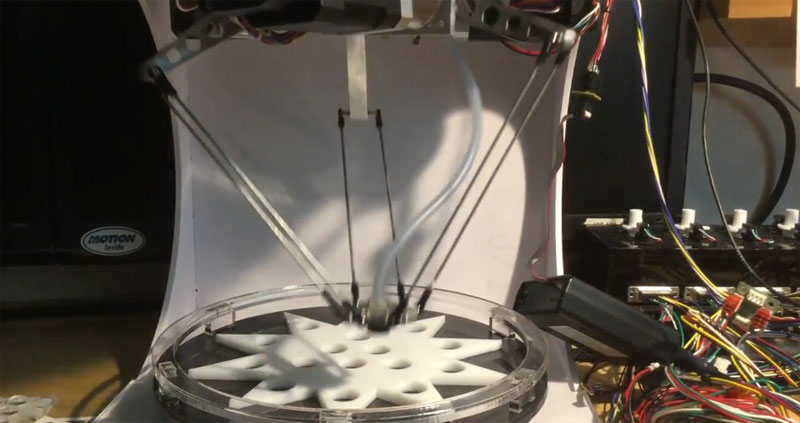
Los robots de tipo Delta son rápidos, muy rápidos ya que debido a su propio funcionamiento, la punta del brazo pesa muy poco y por lo tanto puede desplazarse muy rápidamente. El sistema delta es ampliamente utilizado en aplicaciones industriales y también en algunas impresoras 3D. Hacer un robot de éste tipo mola y mucho, pero su programación no es sencilla ya que los motores, generalmente tres, deben posicionarse con el ángulo acorde a donde queremos apuntar el cabezal. Eso se hace en base a una coordenada espacial (X, Y y Z) y calculando a la inversa la rotación exacta de los motores. A ésto se le llama cinemática inversa (inverse kinematics en inglés). A continuación os dejo un vídeo del funcionamiento de un robot delta casero para ir poniéndose calientes, pero lo más importante y quizás más interesante, es el enlace que os dejo a una función escrita en C para el cálculo de la cinemática inversa y cómo funciona.
Leer más
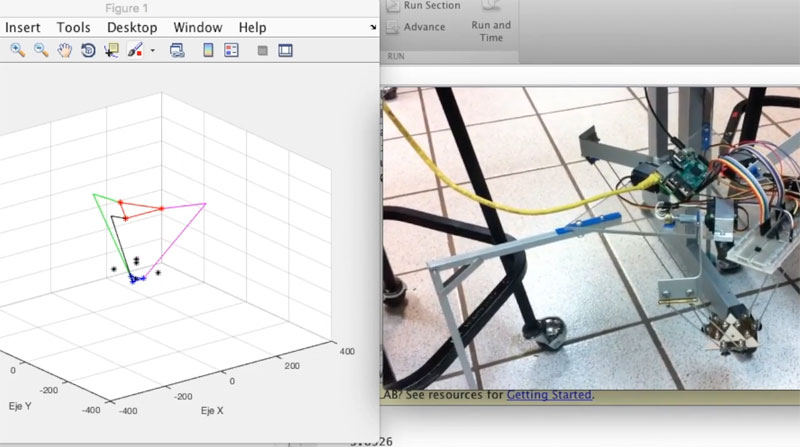
José Hernández nos ha enviado un estupendo proyecto de robot tipo delta que ha desarrollado para el MATLAB and Simulink Mobile Devices Challenge. El robot utiliza una Raspberry Pi con MATLAB y Simulink. Muchas gracias por enviar tu proyecto José, ¡buen trabajo!
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 16/01/2012
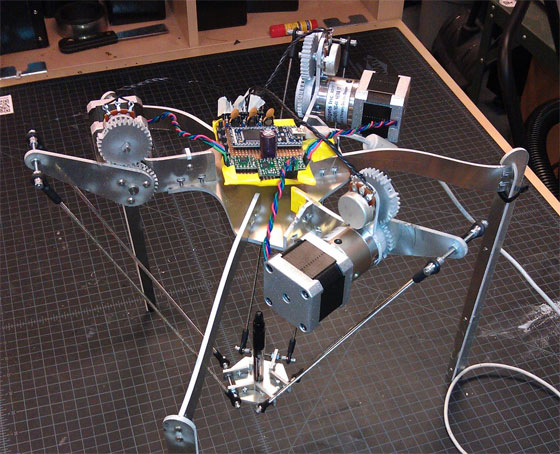
Este robot se llama Pythagoras y fué desarrollado por Aaron Fan que se encuentra actualmente en la Universidad Tecnológica de Georgia en Estados Unidos. Lleva trabajando un largo tiempo en este robot delta, un espectacular tipo de robot del que he hablado en anteriores ocasiones, y que ha ido mejorando. En sus primeras versiones utilizaba servomotores pero una de las mejoras de este robot es el uso de motores paso a paso que le dan mucha más robustez, precisión y control sobre la tarea a realizar. Para probar su robot delta, Aaron ha realizado múltiples pruebas haciendo que su robot dibuje sobre un papel y desde luego los resultados son altamente impresionantes. Os dejo un par de imágenes y el obligatorio vídeo a continuación, pero os recomiendo visitar su web llena de documentación sobre robots delta y su trabajo.
Leer más