Diseñando un robot hexápodo desde cero con cinemática inversa
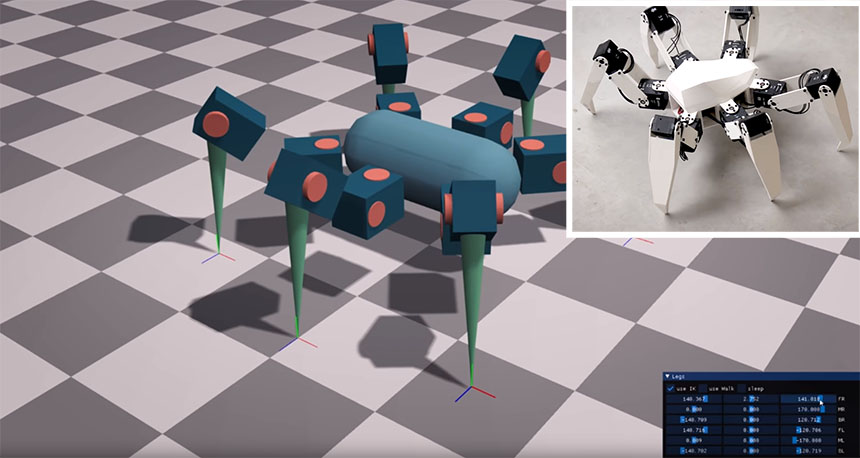
Quizás uno de los más interesantes y vistosos robots que se pueden construir sea el hexápodo, o robot araña. Son robots que llevan una cantidad importante de servos para poder funcionar y que ademas tienen el añadido ser complejos en cuanto a movimiento, ya que para conseguir un movimiento fluido es necesario utilizar cinemática inversa. En lugar de mover ángulos de servos, se posiciona la punta de cada pata en un espacio tridimensional. En el vídeo que os dejo a continuación se puede ver todo el proceso de construccion que comienza por el desarrollo de un modelo en tres dimensiones y su patrón de movimiento. Luego con un poco de impresión 3D y algo de mágica, el resltado final es realmente increible. Por si te interesa, el código fuente está disponible en su Github.