Si habitualmente desarrollas algún tipo de software o creas tus proyectos en alguna plataforma, ya te has dado cuenta que muchas veces es difícil desplegar una aplicación en un entorno de producción sin meter la pata (un fallo lo tiene cualquiera). Existen multitud de herramientas que nos facilitan la vida a los programadores y si todavía no la conoces, Travis CI es una excelente herramienta de integración continua. Travis CI es un servicio de integración continua alojado que se utiliza para crear y probar proyectos de software alojados en GitHub. Los proyectos de código abierto se pueden probar sin coste a través de su web, y los proyectos privados se pueden probar en travis-ci.com por una pequeña cantidad. A continuación te dejo un vídeo que explica como empezar con Travis CI.
Leer más
Bueno, a lo mejor tanto como aprender RUST en 15 minutos no. Con el vídeo que te dejo a continuación podrás aprender las bases del popular lenguaje RUST a golpe de un solo vídeo.
Leer más
 Publicado por Oscar Gonzalez
en RobĂłtica
el 25/12/2022
Publicado por Oscar Gonzalez
en RobĂłtica
el 25/12/2022
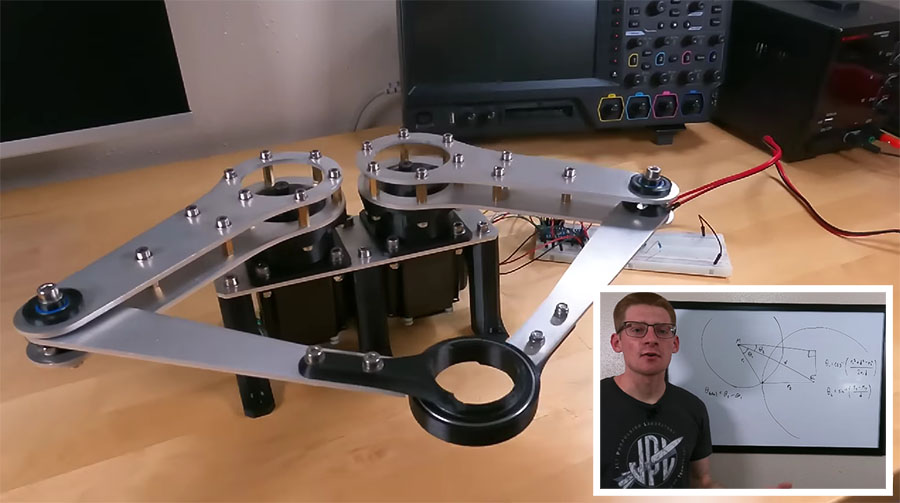
Los robots de tipo SCARA funcionan con dos brazos y en dos dimensiones. Éste tipo de cinemática les permite ser muy rápidos y eventualmente cargar bastante peso. En su esencia, son robots muy sencillos tanto en su diseño como en la mecánica.
Pero la programación de un robot SCARA es algo más complicada ya que hay que calcular la cinemática inversa para que realmente sea útil. Eso implica calcular ángulos y todo tipo de cálculos intensivos, pero un pequeño Arduino Nano puede calcularlos sin problema aunque se quede ligeramente corto.
Levi Janssen nos enseña cómo ha desarrollado, no un robot completo, sino una prueba básica de un robot SCARA con dos motores paso a paso de bucle cerrado con reductora cicloidal y un humilde Arduino.
Leer más
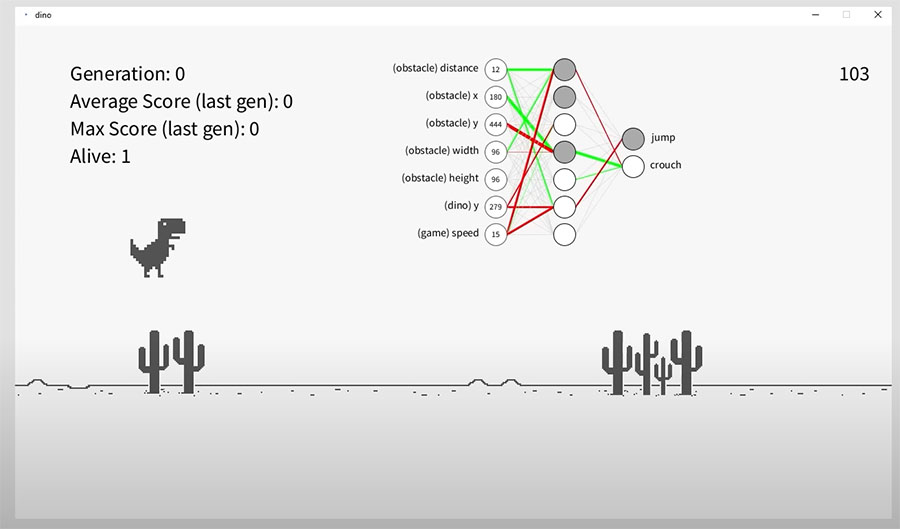
Ya sabes, es ese juego, el que ves en el navegador Chrome cuando te quedas sin Internet y puedes saltar por encima de los cactus. Obviamente es un juego muy simple, pero para hacer más interesante, en el vídeo que te dejo a continuación verás como programar una inteligencia artificial para que aprenda a jugar al juego del dinosaurio.
El resultado es muy curioso, ya que con tan solo 16 neuronas y 16 conexiones la IA consiguió desarrollar habilidades sobrehumanas.
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 14/09/2022
Desde hoy, ya el nuevo Arduino IDE 2.0 ha pasado a versión estable y ya lo puedes descargar con todas sus novedades. Se anunció en su versión Beta en la primavera de 2021 y los comentarios recibidos de la comunidad activa de Arduino han permitido crear nuevas funciones para todos los usuarios. La interfaz sigue en la misma línea, pero ahora es mucho más moderna y rápida.
Ahora el IDE de Arduino se basa en el Eclipse Theia framework, que permite tener tanto una aplicación de escritorio como también en la nube y eso ofrece muchas ventajas, pero veamos más en detalles cuales son las principales novedades.
Leer más