Publicado por Oscar Gonzalez
en RobĂłtica
el 01/05/2024
Publicado por Oscar Gonzalez
en RobĂłtica
el 01/05/2024
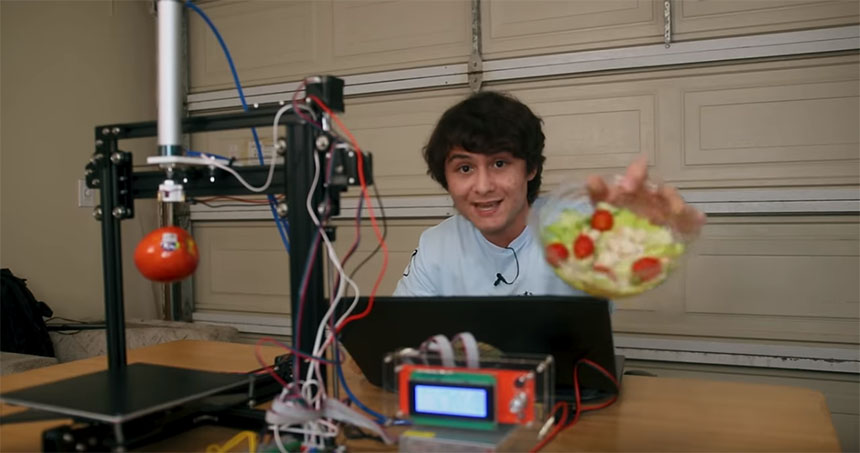
Michael Reeves es un chico al que le gusta inventar todo tipo de aparatos locos para solucionar un problema concreto. Ésta vez se ha encontrado con el problema que no le gustan los tomates en su ensalada y ha diseñado una máquina, basada en una impresora 3D, que es capaz de reconocer los tomates mediante una cámara y lanzar un pistón neumático con un pincho sobre los tomates para quitarlos del plato. Tiene una clara inspiración de Simone Giertz con toques de ElectroBoom, pero desde luego el vídeo y el proyecto son bastante divertidos.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 20/11/2022
Si hacer un robot de cuatro patas es ya suficientemente difícil, más difícil todavía es que se adapte correctamente al terreno. El robot Spot de Boston Dynamics ya lo hace muy bien utilizando mapeado de terreno junto con un buen puñado de sensores para interpretar su entorno, pero éste robot experimental de la Universidad de Berkeley es diferente.
Al contrario que los otros robots, éste no utiliza ningún sistema de mapeado de terreno, ya que utiliza solamente la visión para saber cómo debe mover sus motores para adecuarse al terreno que sea. Es una tarea muy compleja pero según los investigadores que están trabajando con éste proyecto, hace que el robot sea muy robusto y estable.
No hay más que ver el vídeo a continuación...
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 30/10/2019
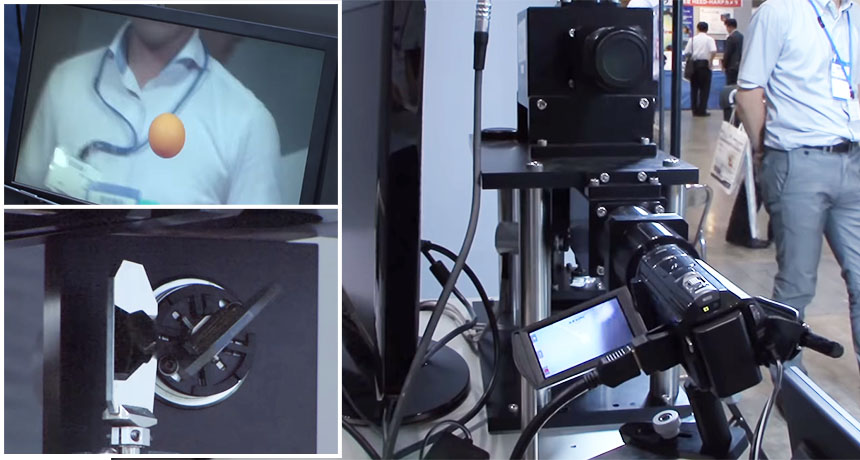
La máquina que te dejo en el vídeo a continuación es capaz detectar de manera muy rápida un objeto como una bola de ping pong. La gran diferencia con otros sistemas, es que es extremadamente rápida y eso lo consigue gracias a que utiliza dos espejos para capturar la imagen. Incluso si en lugar de colocar una cámara, se utiliza con un proyecto, es tan rápida que es capaz de proyectar imágenes sobre una bola de ping pong en tiempo real.
Leer más
Publicado por Oscar Gonzalez
en DIY
el 07/11/2018
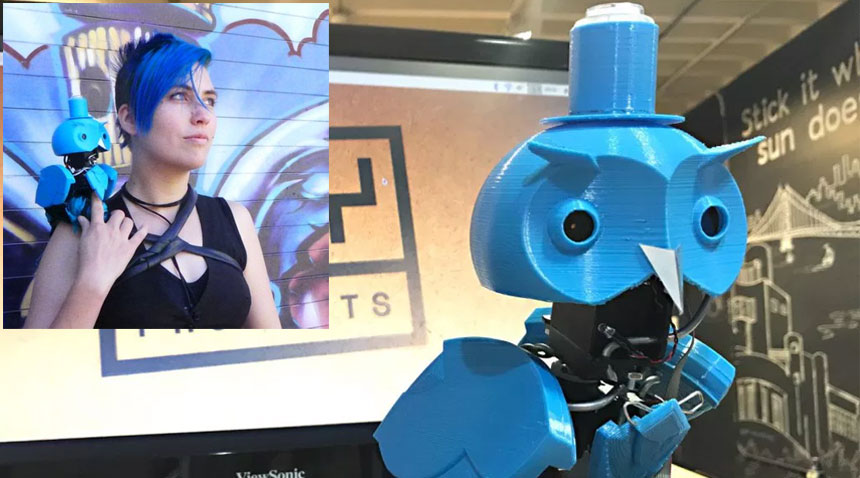
Éste simpático búho ha sido creado por Alex Glow, una persona muy activa en la comunidad maker, pero no es un búho cualquiera ya que utiliza el Google Vision Kit para poder realizar análisis de imágenes. Gracias a esto, puede hacer cosas tan chulas como reconocer las emociones de una cara, reconocer objetos o todo lo que permita el sistema de Google AI.
Leer más
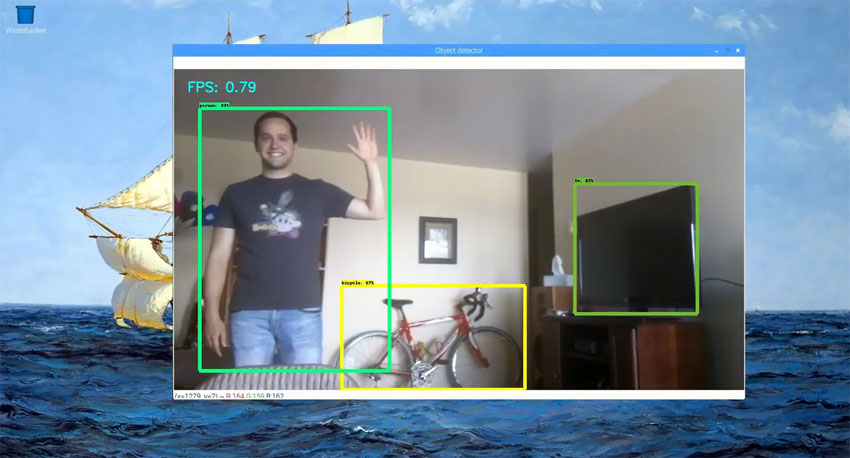
He publicado aquí bastantes veces todo tipo de aplicaciones donde se aplica machine vision (reconocimiento de imagen) y sigue siendo un tema candente lleno de posibilidades. A continuación te dejo un vídeo tutorial muy completo que explica como reconocer diferentes objetos utilizando la librería de Machine Learning TensorFlow y OpenCV. Además, el ejemplo puede quedar muy apañado ya que se monta todo en una Raspberry Pi con su cámara para Raspberry.
Leer más