Publicado por Oscar Gonzalez
en RobĂłtica
el 20/11/2022
Publicado por Oscar Gonzalez
en RobĂłtica
el 20/11/2022
Si hacer un robot de cuatro patas es ya suficientemente difícil, más difícil todavía es que se adapte correctamente al terreno. El robot Spot de Boston Dynamics ya lo hace muy bien utilizando mapeado de terreno junto con un buen puñado de sensores para interpretar su entorno, pero éste robot experimental de la Universidad de Berkeley es diferente.
Al contrario que los otros robots, éste no utiliza ningún sistema de mapeado de terreno, ya que utiliza solamente la visión para saber cómo debe mover sus motores para adecuarse al terreno que sea. Es una tarea muy compleja pero según los investigadores que están trabajando con éste proyecto, hace que el robot sea muy robusto y estable.
No hay más que ver el vídeo a continuación...
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 28/05/2021
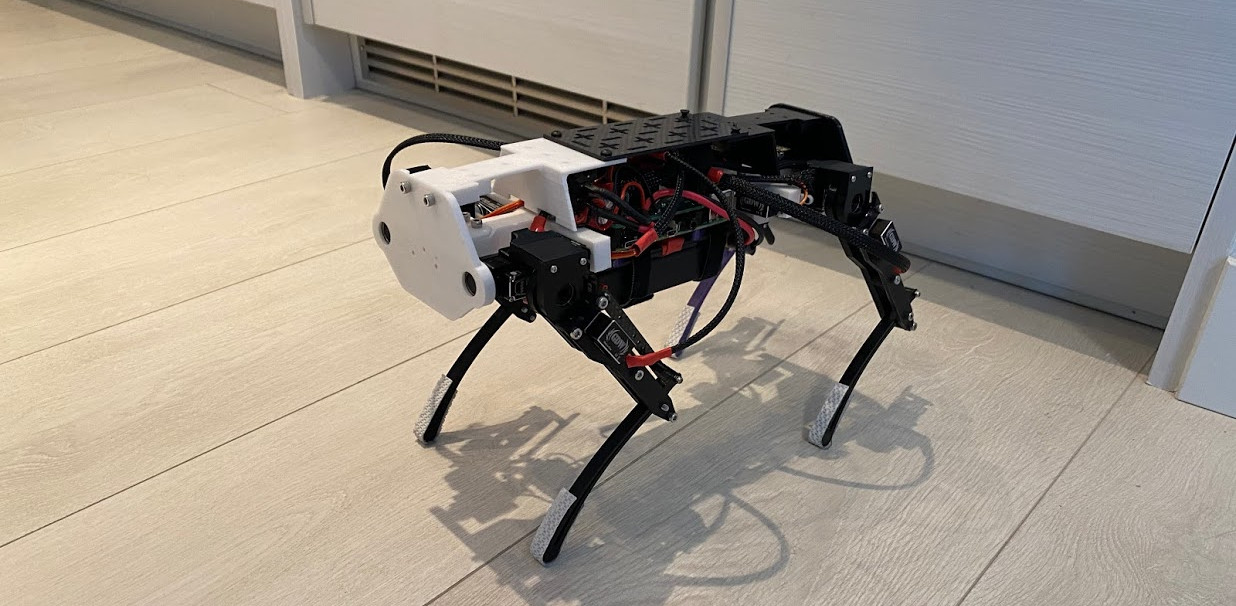
Andres Flores nos envía su nuevo robot, en esta ocasión un perro robot al que ha llamado Pavlov Mini. El robot utiliza el entorno ROS y está construido totalmente desde cero. En los próximos videos nos promete ir explicando en detalle su proceso de contrucción y algoritmos. Tampoco os perdais sus anteriores videos
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 19/05/2021
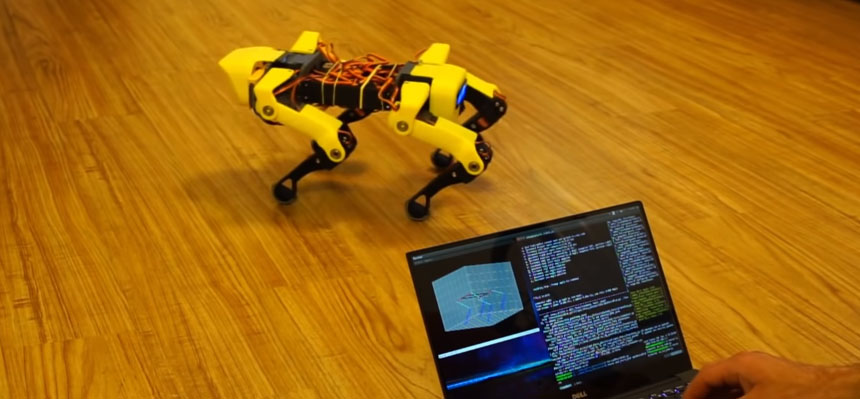
Éste simpático robot se llama Yuki y es un cuadrúpedo capaz de andar sobre superficies lisas. Del control principal se encarga una Raspberry Pi con un software tipo ROS. Éste tipo de robots son bastante difícil de poner a funcionar y afinar ya que tanto el peso como el diseño del robot son críticos para un buen funcionamiento. Aún así, éste robot impreso en 3D lo hace bastante bien y en su web podéis ver más detalles.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 14/08/2020
Desde la salida de Spot, el robot de Boston Dynamics, los robots cuadrúpedos sin duda se han puesto de moda y no es para menos. Pero lo difícil es conseguir movimientos fluidos ya que éste proyecto requiere de bastante matemática y programación. Además si quieres replicarlo utilizando los mismos motores que los pros, te gastarás una buena salsa... Pero los servomotores son baratos y ésta réplica de Spot Mini es lo que utiliza. Además el control lo realiza una Raspberry Pi mediante un código propio escrito en C++ y Python (disponible en Github) sobre una plataforma ROS. Ahí es nada, pero el resultado desde luego es muy bueno ya que puede caminar bastante bien, como puedes ver el en vídeo que te dejo a continuación.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 14/05/2020
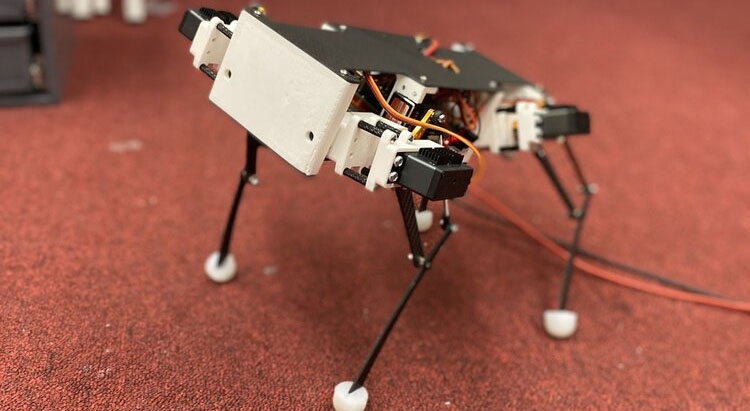
Sin duda, los robots de cuatro patas se han hecho populares gracias a la aparición de Boston Dynamics y en especial su robot Spot. Y no es para menos, son robots con un movimiento muy natural muy similar a un perro por ejemplo. De hecho, ya han aparecido algunas versiones imprimibles y se está creando cierta comunidad entre ellos. Pero no nos engañemos, la dificultad de éste tipo de robots es grande. Unos estudiantes de la Universidad de Stanford han creado un robot cuadrúpedo fácil de construir y acompañado de un software de control basado en Python. Es capaz de andar por supuesto y dado que funciona con una Raspberry Pi, se fácil ampliar sus funcionalidades y tener fuerza de computación suficiente para otras tareas. Para abaratar su coste, se han utilizado servomotores y el resultado es realmente bueno. Has puesto a disposición pública toda la documentación, piezas, CAD y software para que sirva como modelo base y poder evolucionarlo. Os dejo unos interesantes vídeos a continuación de su funcionamiento y los enlaces por si quieres hechar un vistazo o incluso montar el tuyo!
Leer más