Publicado por Oscar Gonzalez
en RobĂłtica
el 31/01/2024
Publicado por Oscar Gonzalez
en RobĂłtica
el 31/01/2024
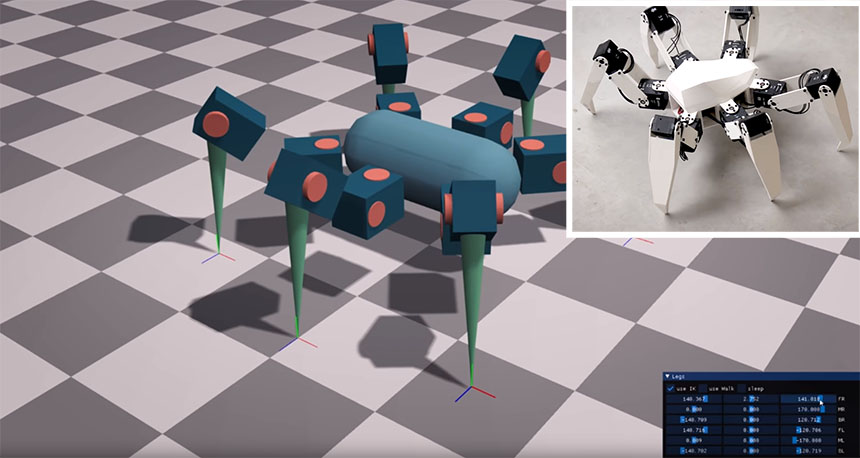
Quizás uno de los más interesantes y vistosos robots que se pueden construir sea el hexápodo, o robot araña. Son robots que llevan una cantidad importante de servos para poder funcionar y que ademas tienen el añadido ser complejos en cuanto a movimiento, ya que para conseguir un movimiento fluido es necesario utilizar cinemática inversa. En lugar de mover ángulos de servos, se posiciona la punta de cada pata en un espacio tridimensional. En el vídeo que os dejo a continuación se puede ver todo el proceso de construccion que comienza por el desarrollo de un modelo en tres dimensiones y su patrón de movimiento. Luego con un poco de impresión 3D y algo de mágica, el resltado final es realmente increible. Por si te interesa, el código fuente está disponible en su Github.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 27/01/2024
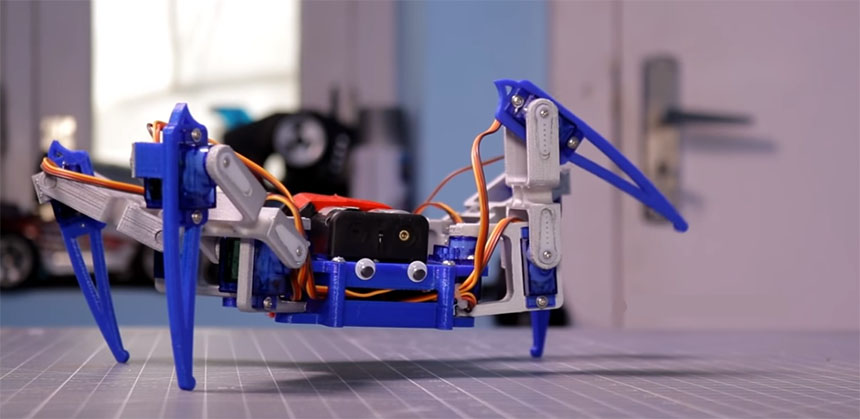
Los robots araña son muy vistosos al tener una forma y movimientos orgánicos, sin embargo no suelen ser robots aptos para principiantes por ser relativamente complejos. Éste pequeño robot araña basado en Arduino que te dejo a continuación, me ha gustado bastante ya que es muy sencillo de fabricar gracias a un chasis impreso en 3D. Utiliza los famosos servos SG90 junto con una pequeña placa de prototipo donde se conectan los servos. Un portapilas 18650 se encarga de la alimentación y tiene un programa de Arduino disponible para realizar movimientos. No tiene control remoto ni sensores de ningún tipo, pero es tan sencillo de construir que puede servir como una muy buena base para evolucionarlo más adelante!
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 02/01/2024
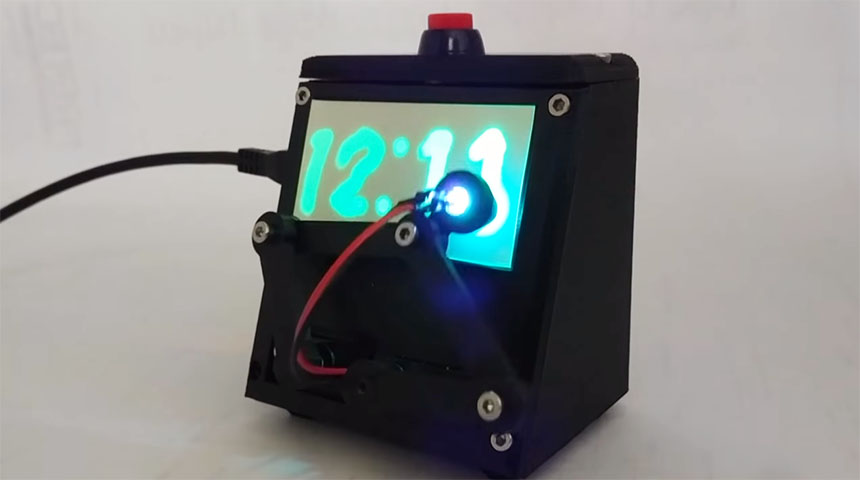
Existen muchos relojes que puedes construir pero creo que ninguno es tan original como éste. Por un lado no es un reloj convencional digital sino que utiliza dos servos con un movimiento tipo SCARA paras dibujar sobre un tablero. Respecto al tablero, es una lámina fluorescente que reacciona a la luz, de la misma composición que las rayas de un reloj de pulsera que alumbran en la oscuridad. Gracias a un pequeño láser y con la ayuda de una placa Arduino, el reloj dibuja pacientemente la hora cada minuto. En el vídeo que os dejo a continuación se muestra un completo tutorial para aprender a montarlo paso a paso.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 30/11/2023
El robot BD-1 de Star Wars no solo es bonito, sino que es una alucinante máquina que es capaz de caminar sobre dos patas en terrenos irregulares.
Este robot no es solo un juguete, sino una sofisticada máquina bípeda que puede equilibrarse dinámicamente, navegar por diferentes terrenos y expresar emociones a través del lenguaje corporal. Fue desarrollado por un equipo de científicos y animadores de Disney Research, que lo presentaron en la Conferencia Internacional IEEE/RSJ de 2023 sobre Robots y Sistemas Inteligentes (IROS) en Detroit.
Y como no podía ser de otra forma, el conocido Maker y Youtube James Bruton se ha fijado en este robot y ha creado un primer prototipo en tan olo dos semanas.
Te dejo el vídeo a continuación para que alucines con tus propios ojos.
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 10/11/2023
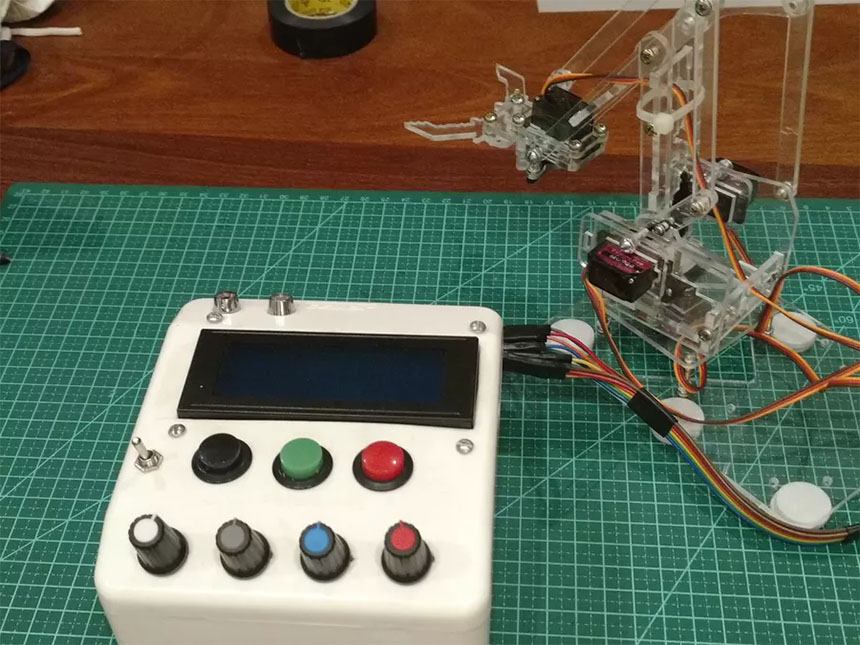
A todos nos gustan los brazos robots complejos, con muchos ejes, impresos en 3D y con cinemática inversa, pero hay que decir que son proyectos complejos y no todo el mundo puede o está dispuesto en meterse a fondo con ello. Para eso, hay opciones mucho más simples y fáciles de montar para simplemente practicar, pasar un rato entretenido y que sea asequible. Sobre todo si quieres aprender más sobre robótica o enseñar a los más pequeños. En el enlace que os dejo a continuación podrás ver el detalle del montaje de un pequeño brazo robot que funciona con servomotores, una forma muy barata de obtener movimiento en robots. Además el control se realiza mediante Arduino mediante unos potenciometros para posicionar los ejes. En pocas horas lo puedes tener funcionando y pasar un rato entretenido al mismo tiempo que aprendes más sobre robótica.
Leer más