Publicado por Oscar Gonzalez
en RobĂłtica
el 30/11/2023
Publicado por Oscar Gonzalez
en RobĂłtica
el 30/11/2023
El robot BD-1 de Star Wars no solo es bonito, sino que es una alucinante máquina que es capaz de caminar sobre dos patas en terrenos irregulares.
Este robot no es solo un juguete, sino una sofisticada máquina bípeda que puede equilibrarse dinámicamente, navegar por diferentes terrenos y expresar emociones a través del lenguaje corporal. Fue desarrollado por un equipo de científicos y animadores de Disney Research, que lo presentaron en la Conferencia Internacional IEEE/RSJ de 2023 sobre Robots y Sistemas Inteligentes (IROS) en Detroit.
Y como no podía ser de otra forma, el conocido Maker y Youtube James Bruton se ha fijado en este robot y ha creado un primer prototipo en tan olo dos semanas.
Te dejo el vídeo a continuación para que alucines con tus propios ojos.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 25/07/2023
James Bruton es un tío que acostumbra a montar todo tipo de robots épicos y si todavía no lo conoces, te recomiendo su canal de youtube donde encontrarás proyectos realmente impresionantes. Uno de sus últimos proyectos es un robot llamado OpenDog con cuatro patas y realmente enorme en cuanto a dimensiones. En ese robot, utiliza unos actuadores lineales de husillos bastante caros y en el vídeo que os dejo a continuación nos explica cómo hacer una réplica de los actuadores pero más pequeños y más económicos, controlados con Arduino.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 13/12/2022
Todo el mundo que graba vídeos en solitario para Youtube (o cualquier otro medio) tiene el mismo problema. Porque cuando grabas solo, te tienes que preocupar de muchas cosas: enfocarte bien, las luces, el audio y mil cosas más.
Para simplificar las cosas al máximo, al final dejas la cámara en el trípode y tiras palante, pero pronto el plano se vuelve aburrido. James Bruton (XRobotsUK) lo sabe también y para hacer los planos de sus vídeos mucho más interesantes, ha desarrollado un robot que puede usar como operador de cámara automático.
A grandes rasgos a montado su cámara sobre una gimbal motorizada, que a su vez ha montado sobre un trípode, que a su vez ha montado sobre un chasis de un robot para que pueda moverse con potentes motores.
Ya así suena bastante bien, pero eso no es todo. Con la ayuda de una Jetson Nano y la salida HDMI de su cámara de vídeo, el robot detecta su cuerpo y ajusta el encuadre y el zoom de forma automática.
Donde muchos otros harían una serie de 5 vídeos para un proyecto como este, James literalmente lo machaca desde cero en un solo vídeo de 15 minutos... lo de éste hombre es realmente increíble.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 29/08/2019
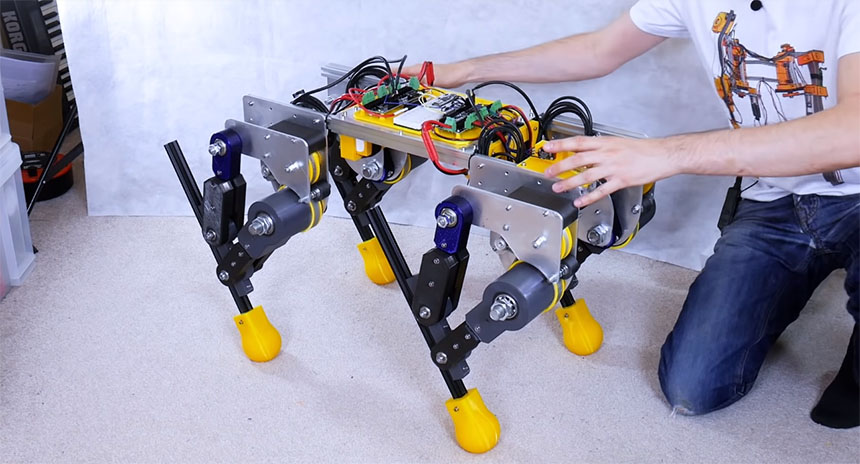
Seguramente te ha pasado alguna vez que te metes en un proyecto muy grande, que exige una gran cantidad de recursos tanto financieros como de tiempo. Esos proyectos molan mucho, pero llega un momento donde te puedes encontrar en un punto donde todo se te queda todo muy grande o se complica demasiado y no llegas a ver el final nunca. De hecho lo más probable es que no lo termines y quede abandonado. Hace ya meses que James Bruton se ha embarcado en construir un robot cuadrípedo llamado Open Dog y desde luego no es moco de pavo. Aún así y debido a que "solo" le falta hacerlo caminar correctamente, ha sacado tiempo de donde no existe para construir otra pequeña réplica con otro sistema diferente en las patas como prueba de concepto. Su objetivo actualmente es poder darle escobazos a lo Boston Dynamics y que se mantenga de pie, casi nada. Quizás algún día llegue a bailar como Spot Mini, quién sabe. De esa forma puede mejorar todo el sistema para finalmente implementarlo en su robot principal Open Dog.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 06/09/2018
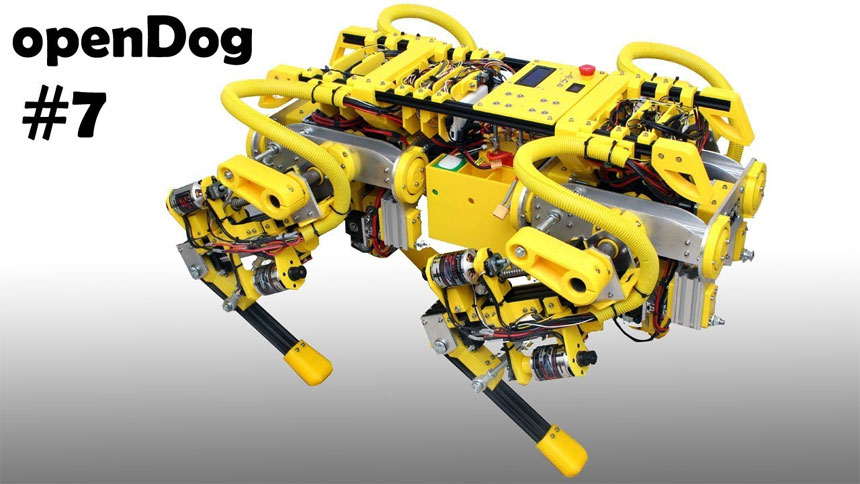
Éste hombre no deja de impresionarme tanto por la constancia como por la gran calidad de su trabajo. James Bruton, del cual ya que hablado muchas veces por aquí, lleva ya varias semanas diseñando y montando su robot OpenDog, una versión Open Source del famoso robot de Boston Dynamics. Hace pocos días ha publicado la séptima parte donde instala la electrónica y deja listo todo el robot para la programación en la siguiente fase. Es totalmente masivo y lleno de todo tipo de uniones mecánicas, así como plagado de controladores de motores para gestionar el movimiento de las patas. Es curioso, ya que ha utilizado guía lineales con husillos para el movimiento y también motores brushless con enconders para controlar el movimiento. Será totalmente épico cuando ese robot pueda moverse, ¡no te pierdas el vídeo a continuación!
Leer más