Publicado por Oscar Gonzalez
en Arduino
el 21/04/2024
Publicado por Oscar Gonzalez
en Arduino
el 21/04/2024
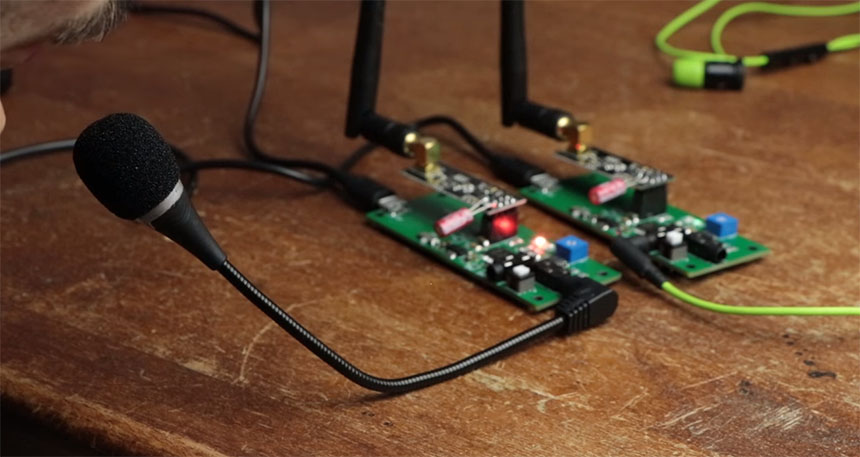
Si todavía no conoces el canal de Youtube de GreatScott, es que has vivido debajo de una piedra y ya estás tardando en suscribirte. Scott es un tío que no se anda con rodeos y lleva hasta el final cualquier proyecto, funcione o no. En ésta ocasión se ha propuesto construir un intercomunicador inalámbrico casero con Arduino para su moto. Lamentablemente y por razones de ancho de banda, no ha funciona como esperado pero es muy interesante el planteamiento que sugiere. Lo grande de la comunidad Maker y el movimiento Open Source en general, es que otras personas puede ayudar a mejorar un diseño para beneficio de todos y casualmente Andreas Spiess , más conocido como "el tio del acento suizo", ha saco también un genial vídeo sobre el proyecto de Great Scott para solucionar el problema. Así que tenemos dos vídeos de dos épicos Makers para disfrutar que os dejo a continuación.
Leer más
Si habitualmente desarrollas algún tipo de software o creas tus proyectos en alguna plataforma, ya te has dado cuenta que muchas veces es difícil desplegar una aplicación en un entorno de producción sin meter la pata (un fallo lo tiene cualquiera). Existen multitud de herramientas que nos facilitan la vida a los programadores y si todavía no la conoces, Travis CI es una excelente herramienta de integración continua. Travis CI es un servicio de integración continua alojado que se utiliza para crear y probar proyectos de software alojados en GitHub. Los proyectos de código abierto se pueden probar sin coste a través de su web, y los proyectos privados se pueden probar en travis-ci.com por una pequeña cantidad. A continuación te dejo un vídeo que explica como empezar con Travis CI.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 25/07/2023
James Bruton es un tío que acostumbra a montar todo tipo de robots épicos y si todavía no lo conoces, te recomiendo su canal de youtube donde encontrarás proyectos realmente impresionantes. Uno de sus últimos proyectos es un robot llamado OpenDog con cuatro patas y realmente enorme en cuanto a dimensiones. En ese robot, utiliza unos actuadores lineales de husillos bastante caros y en el vídeo que os dejo a continuación nos explica cómo hacer una réplica de los actuadores pero más pequeños y más económicos, controlados con Arduino.
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 29/10/2019
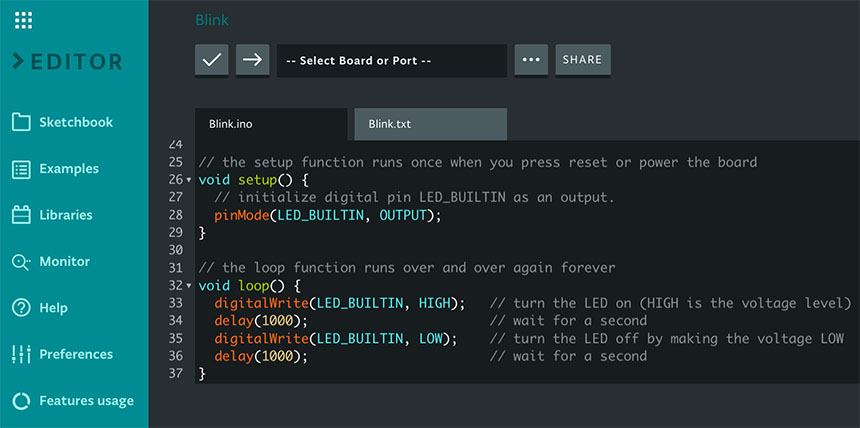
A éstas alturas, todos conocemos el Arduino IDE, un sencillo editor en el cual seguro que dejas un montón de horas para hacer funcionar el código de vuestros proyectos. En la mayoría de los casos es más que suficiente pero los chicos de Arduino están haciendo un gran esfuerzo esfuerzo en mejorar la herramienta, ofreciendo más opciones que nunca e incluyendo un editor avanzado llamado Arduino Pro IDE. Actualmente aún no se encuentra listo para usar ya que está en su fase Alpha, pero a parte de un entorno visual renovado y ligero, ofrece características tan interesantes como la visión en árbol del proyecto, un nuevo gestor de placas y librerías, así como el autocompletado de funciones. Eso si, por el momento solo en entornos ARM, pero es una opción que se echa mucho de menos. Por el momento, se encuentra en fase de pruebas por un pequeño grupo de desarrolladores para poder mejorar muchas cosas que faltan, y a continuación os dejo un vídeo de las primeras impresiones.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 31/05/2019
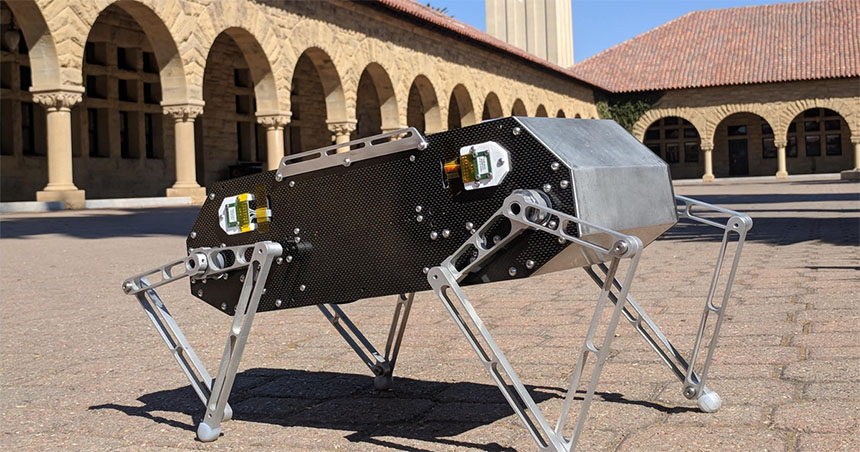
Admítelo, a todos nos gustaría tener un robot como el Spot Mini de Boston Dynamics en casa para ser el rey de la casa, pero también debemos admitir que son robots complejos y es muy probable que aunque te plantees montar uno no sepas por dónde empezas. Unos estudiantes dela Universidad de Stanford han desarrollado el proyecto Doggo, un robot totalmente Open Source que han puesto disponible en Github para que lo puedas montar y experimentar siendo una plataforma relativamente barata. Es un robot de cuatro patas, que me recuerda el Ghost Minitaur, capaz de andar o incluso saltar y está motorizado con dos motores brushless por eje junto con sus encoders y electrónica de control. Y si lo tuyo son las burras grandes, siempre puedes plantearte montar el OpenDog de James Bruton para hacerlo todavía más épico, aunque necesitarás un salón un poco más grande, pero eso a quién le importa? :)
Leer más