El diseño, construcción y programación de un robot SCARA
Publicado por Oscar Gonzalez
en Robótica
el 25/12/2022
Los robots de tipo SCARA funcionan con dos brazos y en dos dimensiones. Éste tipo de cinemática les permite ser muy rápidos y eventualmente cargar bastante peso. En su esencia, son robots muy sencillos tanto en su diseño como en la mecánica.
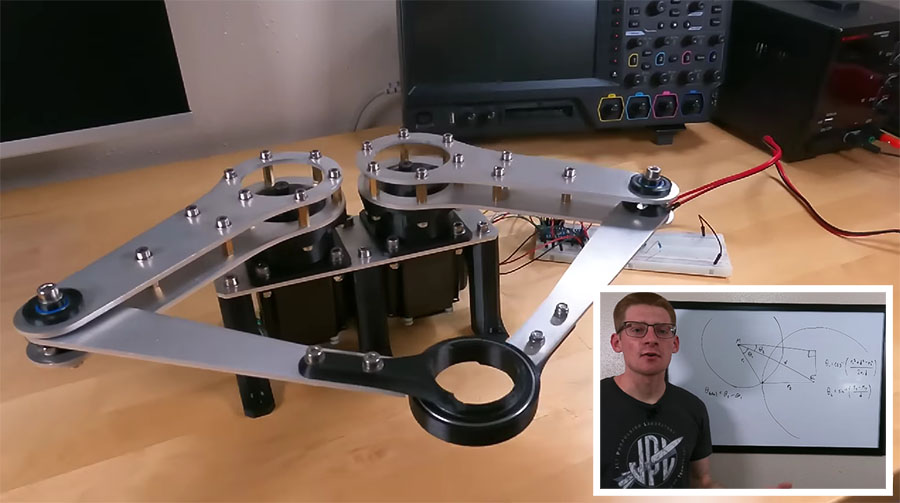
Pero la programación de un robot SCARA es algo más complicada ya que hay que calcular la cinemática inversa para que realmente sea útil. Eso implica calcular ángulos y todo tipo de cálculos intensivos, pero un pequeño Arduino Nano puede calcularlos sin problema aunque se quede ligeramente corto.
Levi Janssen nos enseña cómo ha desarrollado, no un robot completo, sino una prueba básica de un robot SCARA con dos motores paso a paso de bucle cerrado con reductora cicloidal y un humilde Arduino.