Ajuste PID de un Quadcopter con Maple y Razor 9 DOF
Publicado por Oscar Gonzalez
en Modelismo
el 30/01/2012
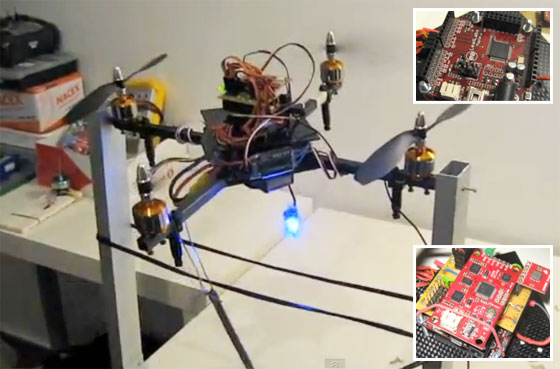
Xoan Carlos nos envía un vídeo de las primeras pruebas de equilibrio de un quadricoptero hecho con la placa Maple y el sistema de medición inercial 9DOF Razor IMU-AHRS. También incluye un sensor de presión barométrica BMP085 que servirá más adelante para el control de altitud. Hemos visto por aquí una infinidad de quadcopter con Arduino y la verdad es que me llama la atención que Xoan utiliza un a placa Maple dado que es bastante más potente que un Arduino. Seguiremos de cerca este proyecto del que seguro tendremos más noticias en breve. Enhorabuena xoan, excelente trabajo!
No os perdais el vídeo a continuación...
