MapleCopter: Un quadcopter casero con Maple
Publicado por Oscar Gonzalez
en Modelismo
el 13/06/2012

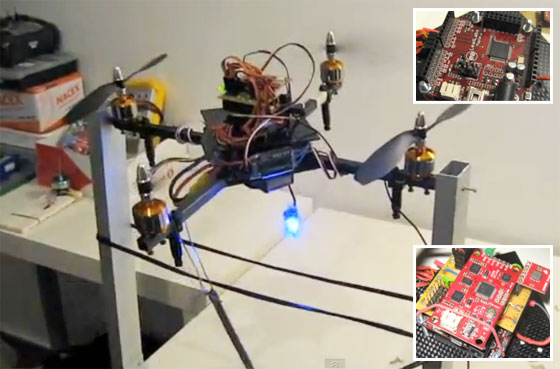
Nuestro amigo Xoan Carlos desde Gondomar nos comenta la finalización de su proyecto de Quadcopter casero. Es un impresionante aparado del que ya hemos hablado con anterioridad y que utiliza una placa Maple junto con una unidad de medición inercial RAZOR 9 DOF para su control. Las primeras pruebas de vuelo fueron muy satisfactorias y vuela realmente muy bien. Como siempre, el ajuste del PID lleva su tiempo pero Xoan ya está trabajando en una shield para montarlo todo de forma más sólida. Estupendo trabajo Xoan!
No os perdais más detalles a continación...