Publicado por Oscar Gonzalez
en RobĂłtica
el 25/07/2023
Publicado por Oscar Gonzalez
en RobĂłtica
el 25/07/2023
James Bruton es un tío que acostumbra a montar todo tipo de robots épicos y si todavía no lo conoces, te recomiendo su canal de youtube donde encontrarás proyectos realmente impresionantes. Uno de sus últimos proyectos es un robot llamado OpenDog con cuatro patas y realmente enorme en cuanto a dimensiones. En ese robot, utiliza unos actuadores lineales de husillos bastante caros y en el vídeo que os dejo a continuación nos explica cómo hacer una réplica de los actuadores pero más pequeños y más económicos, controlados con Arduino.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 29/08/2019
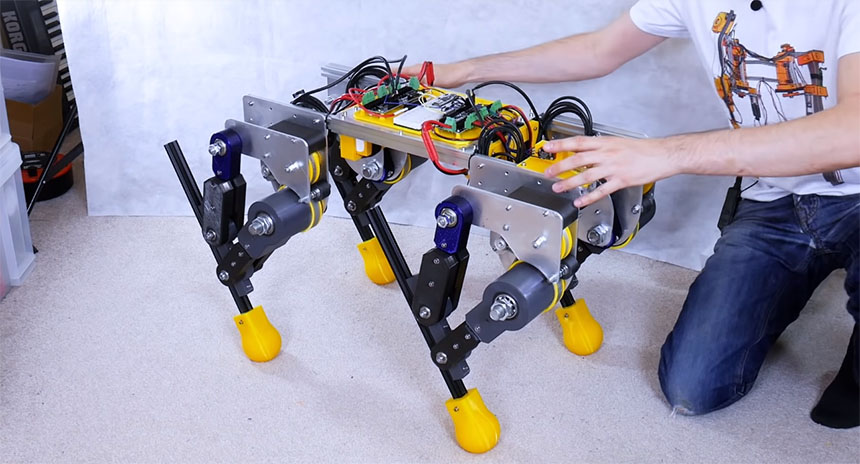
Seguramente te ha pasado alguna vez que te metes en un proyecto muy grande, que exige una gran cantidad de recursos tanto financieros como de tiempo. Esos proyectos molan mucho, pero llega un momento donde te puedes encontrar en un punto donde todo se te queda todo muy grande o se complica demasiado y no llegas a ver el final nunca. De hecho lo más probable es que no lo termines y quede abandonado. Hace ya meses que James Bruton se ha embarcado en construir un robot cuadrípedo llamado Open Dog y desde luego no es moco de pavo. Aún así y debido a que "solo" le falta hacerlo caminar correctamente, ha sacado tiempo de donde no existe para construir otra pequeña réplica con otro sistema diferente en las patas como prueba de concepto. Su objetivo actualmente es poder darle escobazos a lo Boston Dynamics y que se mantenga de pie, casi nada. Quizás algún día llegue a bailar como Spot Mini, quién sabe. De esa forma puede mejorar todo el sistema para finalmente implementarlo en su robot principal Open Dog.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 30/10/2018
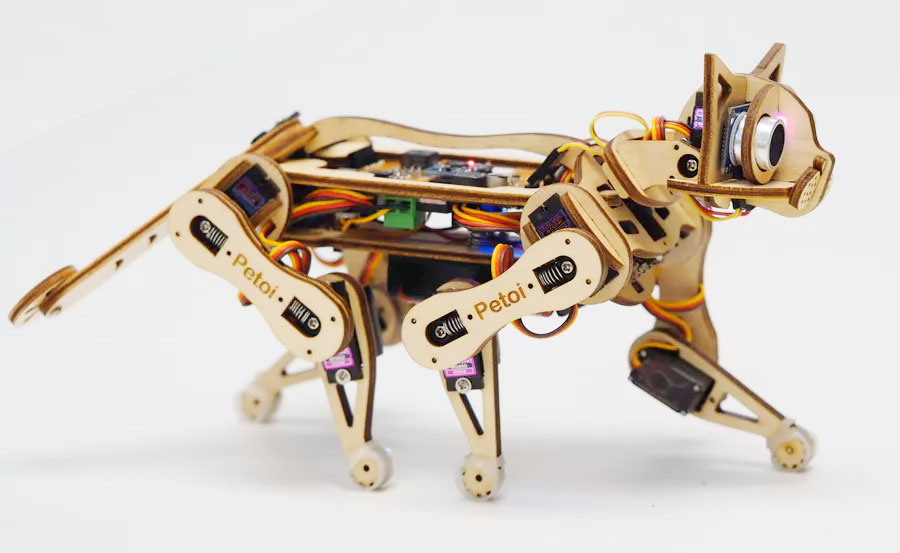
Qué sería de nosotros y qué sería de Internet sin los gatitos, yo creo que nada sería lo mismo sin duda. Petoi Nybble es un pequeño robot en forma de gato que ha dado mucho que hablar en los últimos días y la verdad es que es una idea que hasta ahora no se había visto, salvo el OpenDog de James pero eso ya son cosas mayores. Éste es bastante más pequeño y funciona con servomotores que le permite caminar. El chasis o cuerpo del gatito está hecho de madera cortada a láser así que el montaje no parece demasiado difícil. También dispone de sensores para reaccionar a su entorno e incluso se le puede rascar la espalda para que se sienta contento.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 06/09/2018
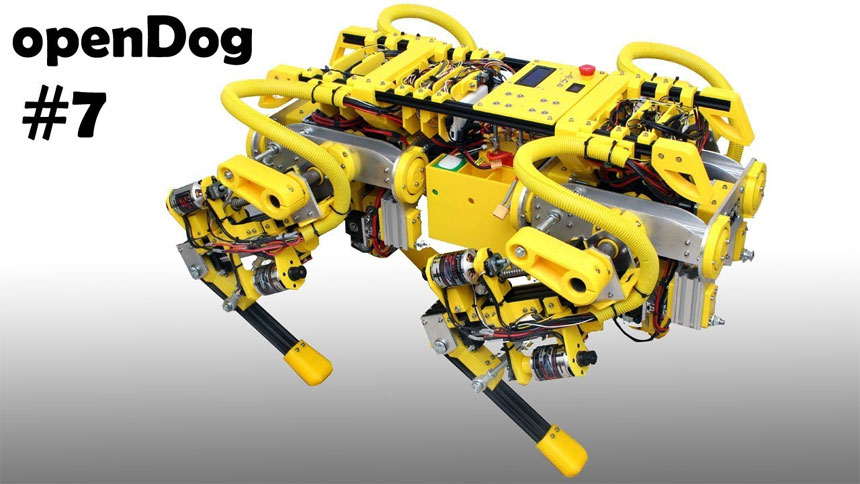
Éste hombre no deja de impresionarme tanto por la constancia como por la gran calidad de su trabajo. James Bruton, del cual ya que hablado muchas veces por aquí, lleva ya varias semanas diseñando y montando su robot OpenDog, una versión Open Source del famoso robot de Boston Dynamics. Hace pocos días ha publicado la séptima parte donde instala la electrónica y deja listo todo el robot para la programación en la siguiente fase. Es totalmente masivo y lleno de todo tipo de uniones mecánicas, así como plagado de controladores de motores para gestionar el movimiento de las patas. Es curioso, ya que ha utilizado guía lineales con husillos para el movimiento y también motores brushless con enconders para controlar el movimiento. Será totalmente épico cuando ese robot pueda moverse, ¡no te pierdas el vídeo a continuación!
Leer más