Publicado por Oscar Gonzalez
en Robótica
el 01/06/2023
Publicado por Oscar Gonzalez
en Robótica
el 01/06/2023
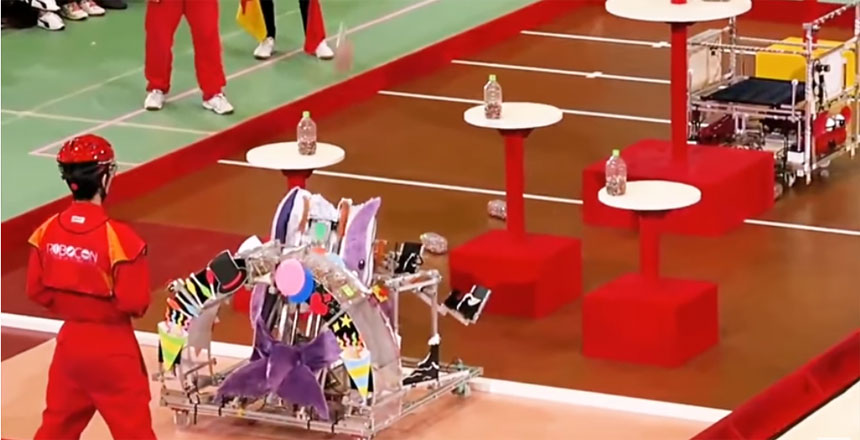
En las diferentes redes, de vez en cuando (de hecho bastante a menudo), surgen los típicos retos que se hacen virales como aquel de lanzar una botella de agua por el aire dando vueltas y que aterrice en pie. Lo interesante o didáctico que puede llegar a ser algo así es cuestionable y da para bastante debate, pero en el vídeo que os dejo a continuación, se le ha dado una vuelta de tuerca con una competición de ese mismo juego, pero con robots. Los alumnos de entre 15 y 20 años deben fabricar un robot que lance una botella de la forma más eficaz posible y superar unas pruebas. La base del reto sigue siendo lo que es, pero al incorporar robótica e ingeniería en general, genera mucha más motivación en los alumnos a la vez que realmente aprenden a resolver problemas reales, mejorando su conocimiento en éste sector.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 30/05/2023
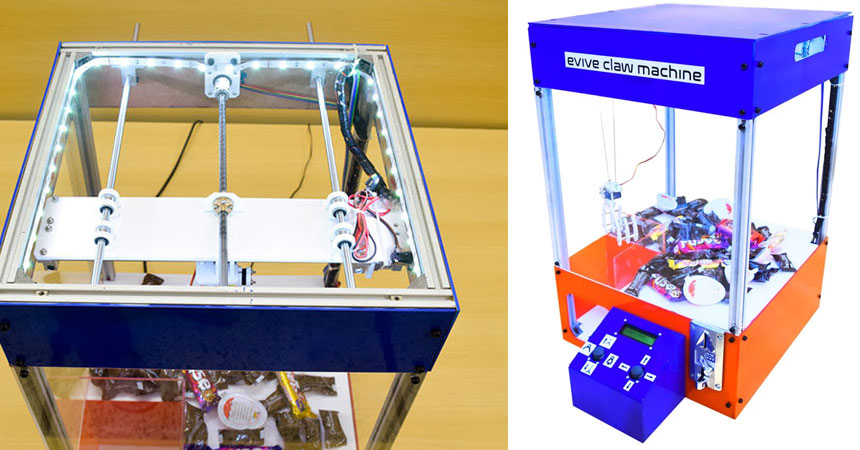
A quién no le gusta un caramelo? y a quién no le gusta las máquinas caseras con sus rodamientos, varillas y electrónica? Pues éste proyecto es realmente interesante para todo aquel que le gusten ambas cosas. Es una pequeña máquina de vending casera típica de las ferias donde el juego consiste en atrapar mediante un gancho diferentes premios que luego saldrá por una trampilla (solo si lo consigues, claro). La estructura es muy robusta ya que utiliza perfiles de extrusión y tan solo utiliza dos motores paso a paso para mover el cabezal. Es un proyecto muy vistoso y atractivo que podrás utilizar en las mejores fiestas :)
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 25/05/2023
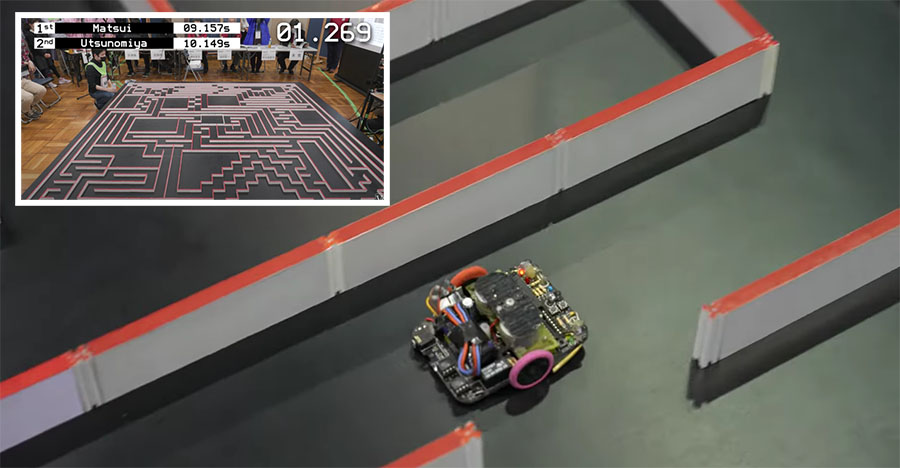
Supongo que ya conoces el canal de YouTube de Veritasium, un canal principalmente de divulgación científica pero contado de una manera amena para el gran público. En esta ocasión Derek ha creado un completo y apasionante vídeo de algo que conocemos bien y trata sobre las competiciones de laberinto de los micromouse.
Es un resumen realmente espectacular, desde dónde se ha creado originalmente la competición y sobre todo los avances que fueron aportando los robots en cada temporada.
Se parece mucho a la fórmula 1 en ese aspecto, ya que cada cierto tiempo, un robot aparece con una mejora que luego todos los demás acaban utilizando. Por ejemplo, ese el caso del uso de un ventilador de succión para pegar el robot al suelo y poder tomar las curvas mucho más rápido.
Era algo totalmente novedoso y revolucionario en su momento y todos los robots de competición posteriores acabaron usando el mismo sistema. Pero no solo eso, también el trazado de las curvas evolucionó, ya que en el principio, los robots recorrían la cuadrícula del laberinto girando 90 grados en cada celda.
Hasta que a alguien se le ocurrió que podía tomar las curvas en diagonal y los tiempos se redujeron drásticamente, apareciendo al mismo tiempo todo tipo de estrategias nuevas para resolver el laberinto como el "flood fill" o algoritmo de relleno por difusión.
La competición de micromouse es probablemente una de las disciplinas más completas que existe en robótica, ya que engloba todas las materias importantes como la mecánica, programación, ingeniería, diseño de PCB, electrónica y un largo, etc.
En cualquier caso, aunque está en inglés y puedes activar si quieres los subtítulos en Español, es un increíble vídeo que merece la pena ver y que te dejo a continuación.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 08/05/2023
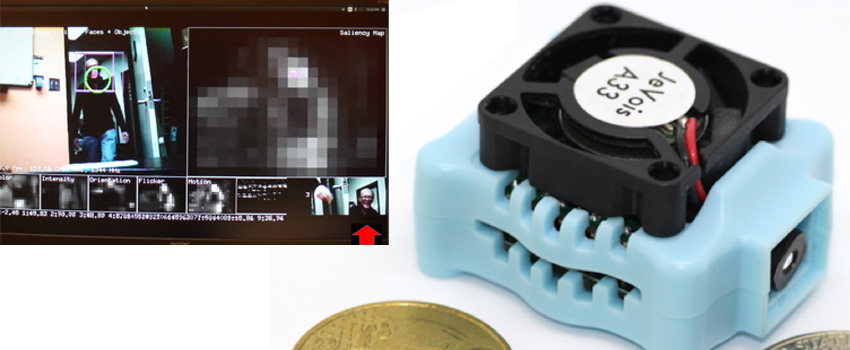
JeVois es el nombre de una interesante cámara miniatura orientada a proyectos de Machine Vision con Deep Learning que se puede utilizar fácilmente en todo tipo de proyectos incluyendo robots. Dentro esconde un potente procesador de imágenes que basado en el Allwinner A33 quad core ARM Cortex A7 que usa diferentes modelos de Deep Learning. Dispone de un framework para poder programarla con Python y OpenCV pero aún así por defecto es capaz de reconocer 1000 objetos diferentes usando TensorFlow aunque también puedes utilizar Darknet YOLO, Eye Tracking, navegación autónoma para modelos RC, reconocimiento de objetos o incluso detección de "cosas interesantes" al igual que el ojo humano. Es capaz de realizar todas esas operaciones a un frame rate muy algo por encima de los 60fps y además las puedes utilizar, junto con todas las funcionalidades indicadas como cámara USB. Lo mejor de todo es que tiene un precio que ronda tan solo los 60 dólares. Están saliendo dispositivos muy interesantes en la actualidad y seguro seguiremos viendo ésta tendencia en el futuro.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 04/05/2023
Este brazo robótico basado en Arduino con un sistema de control único cuesta menos de $60. En el vídeo verás todo el proceso de diseño, ensamblaje y código. El objetivo era diseñar un brazo que fuera lo más compacto posible y que no tuviera un lío de cables saliendo de él.
¡Y la verdad es que este brazo quedó bastante resultón!
Leer más