Publicado por Oscar Gonzalez
en Robótica
el 25/07/2023
Publicado por Oscar Gonzalez
en Robótica
el 25/07/2023
James Bruton es un tío que acostumbra a montar todo tipo de robots épicos y si todavía no lo conoces, te recomiendo su canal de youtube donde encontrarás proyectos realmente impresionantes. Uno de sus últimos proyectos es un robot llamado OpenDog con cuatro patas y realmente enorme en cuanto a dimensiones. En ese robot, utiliza unos actuadores lineales de husillos bastante caros y en el vídeo que os dejo a continuación nos explica cómo hacer una réplica de los actuadores pero más pequeños y más económicos, controlados con Arduino.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 19/07/2023
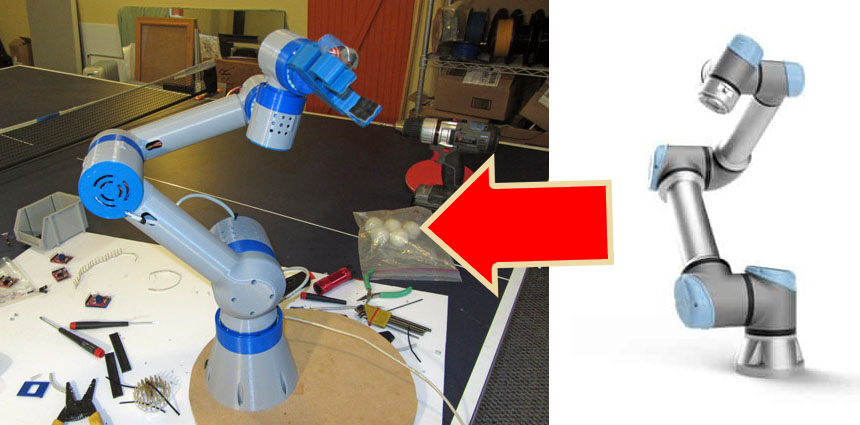
Los brazos robots tienen mucho encanto, pero no es un proyecto que puedas montar en un fin de semana después de la siesta, sino que es un proyecto de hecho bastante complejo.
El brazo robot industrial UR8 es conocido por su forma extraña y sus seis ejes de movilidad, además de utilizar engranajes planetarios para minimizar el espacio ocupado y aprovechar a la máxima potencia de los motores.
Lo malo de esos engranajes es que son bastante caros, pero este modelo que te dejo hoy aquí es una réplica al 80% de su tamaño original, que también utiliza engranajes planetarios, pero impresos también en 3D.
Por razones obvias no son tan robustos como unos de metal, pero permite montar un brazo robot muy similar para ser el amo en cualquier fiesta de cumpleaños :)
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 17/07/2023
Hace ya tiempo que vengo siguiendo este espectacular proyecto de cerca y creo que la espera ha valido la pena. Se trata de un brazo robot de 6 ejes impreso casi en su mayoría en 3D.
Pero no es la primera vez que vemos un brazo robot publicado aquí, de hecho he publicado bastantes, pero lo especial de este que por supuesto es Open Source es su excelente documentación, así como su tamaño muy compacto y basado en motores paso a paso que le dan una gran precisión.
Antes de que empieces a calentar tu impresora, no te pierdas el enlace a su Github donde podrás ver todos los documentos tanto STL como un genial manual de ensamblaje.
El código fuente también está disponible y está pensado para un Arduino MEGA implementando también cinemática inversa que no es poco. A continuación tienes cinco completos vídeos que explican desde absolutamente cero su diseño y montaje, incluso sobre cómo funcionan sus ejes a nivel matemático.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 30/06/2023
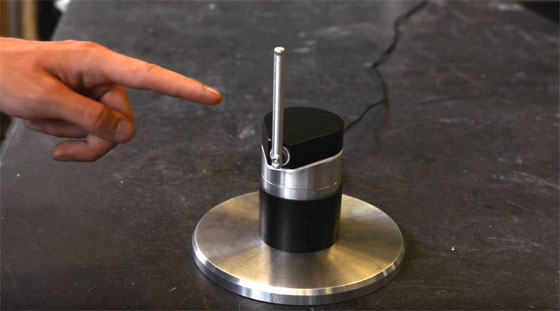
Está basado en el péndulo de Furuta, inventado en 1992 por Katsuhisa Furuta en el Instituto Tecnológico de Tokio. Es un sistema subactuado de dos grados de libertad rotacionales. El brazo tiene un giro alrededor de un eje perpendicular a la base, mientras que el péndulo invertido puede girar libremente sobre su eje. Su autor ha utilizado un motor sin escobillas junto con piezas mecanizadas por CNC. El resultado es muy pequeño y totalmente hipnotizante. No os perdaís su web que os dejo enlazada a continuación para ver los detalles de la construcción de ésta pequeña maravilla.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 19/06/2023
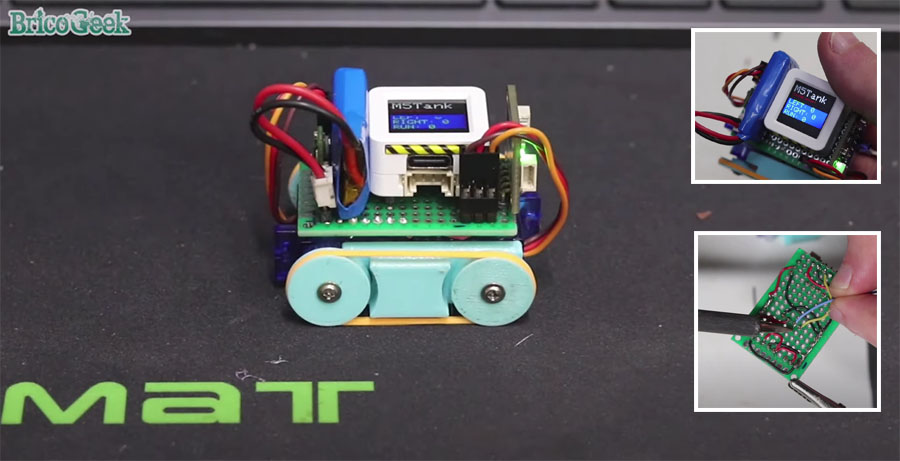
No es un tanque cualquiera, ya que utiliza un potente microcontrolador ATOM ESP32 S3 de M5Stack. Y lo mejor es que cabe en la palma de tu mano.
Pero no solo eso, no es el típico proyecto que montas y ya está, es algo más. Es el punto de entrada al fabuloso mundo de los tanques, donde he aprendido que su diseño es mucho más completo de lo que pensaba.
En el vídeo que te dejo a continuación te lo explico en detalle y además te contaré lo que viene después.
Leer más