Publicado por Oscar Gonzalez
en TecnologĂa
el 24/02/2024
Publicado por Oscar Gonzalez
en TecnologĂa
el 24/02/2024
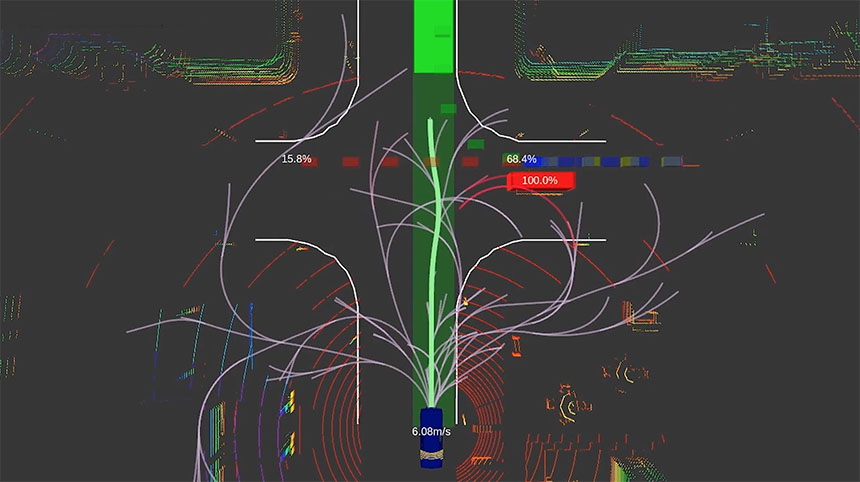
La razón por la que es tan importante la planificación de movimientos rápidos para vehículos autónomos es porque la planificación de movimientos abarca el proceso mediante el cual el vehículo decide qué hacer a continuación. Hacer este proceso más rápido no solo significa que el vehículo puede tomar decisiones más rápidamente, sino que también puede tomar decisiones mucho mejores: mantener al pasajero y a todos los que lo rodean lo más seguros posible. Mientras que la mayoría de los coches autónomos se basan en sistemas de planificación de movimiento que funcionan a una velocidad de entre 3 Hz y 10 Hz, el nuevo sistema de Realtime Robotics funciona a 1.000 Hz, pasando por una red masiva de datos de posibles trayectorias en paralelo.
Leer más
Publicado por Oscar Gonzalez
en TecnologĂa
el 16/09/2019
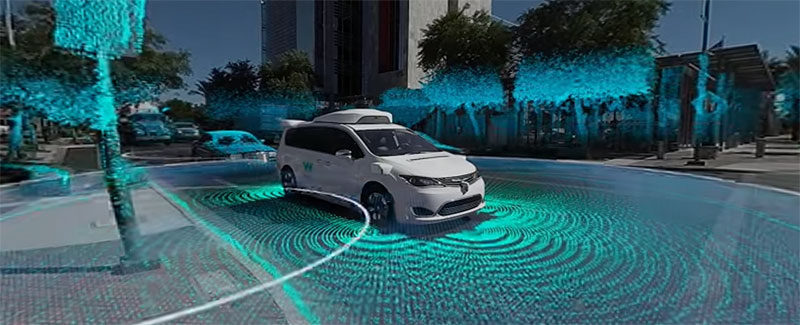
No hace tanto tiempo en el que te quedabas con la boca abierta al ver como un coche cualquiera podía aparcar solo gracias a un puñado de sensores. Eso ya era tecnología punta, claro que el Walkman también lo era en su momento, pero hoy por hoy la tecnología en general está avanzando tan rápido que es capaz de hacer que los coches conduzcan solos. Lo que por el momento te puede parecer mágia o tecnolo´gia del futuro, realmente ya está aquí y Waymo lo demuestra con su coche autónomo. Waymo es la empresa que ha empezado junto a Google a desarrollar su tecnología de coches inteligentes y autónomos en el año 2009. Has pasado 10 años y éste es el resultado. Desde luego, parece que el futuro promete que ya no tendremos que conducir nosotros mismos, sino que el coche pilotará por nosotros. Pero ¿Cual es la sensación de no tener nadie al volante? A continuación un vídeo sin desperdicio.
Leer más
Publicado por Oscar Gonzalez
en TecnologĂa
el 28/02/2018
Hoy en día aún puede parecer hasta brujería, pero los coches autónomos ya son una realidad y cada día lo hacen mejor. Éste se llama Waymo y utiliza una tecnología iniciada en 2009 por Google para desarrollar un coches capaz de conducir por cualquier sitio sin intervención humana. En el vídeo que se puede ver en 360 grados, se ve lo extraordinariamente complejo que debe ser juntas la enorme cantidad de datos de todos sus sensores para obtener algo coherente y sobre todo interpretable por una máquina.
Leer más
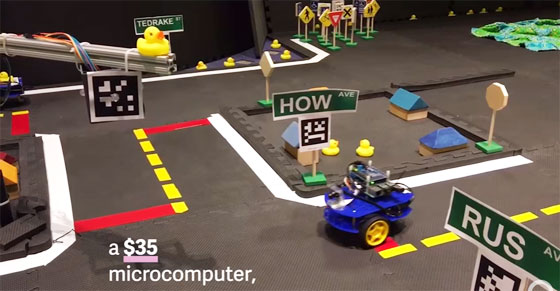
Los coches autónomos no son una mera moda y han venido para quedarse, incluso ya hay quien incluso aprovecha para dormir una siesta aprovechandose del piloto automático. Sin embargo la programación necesaria para conseguir que un coche se pilote solo es bastante compleja y entran en el oscuro mundo del Machine Learning para conseguir que funcione bien, aunque este tipo de técnicas no están disponibles para todo el mundo. En robótica ésta técnica también es interesante y aprovechando la gran potencia de computación de la Raspberry Pi y yendo más allá de los robots sigue líneas, unos chicos del MIT desarrollaron una plataforma libre orientada a escuelas y aprendizaje llamada Duckietown, que tiene todas las herramientas necesarias para desarrollar pequeños robots que son capaces de guiarse solos en una pequeña cuidad simulada. Se basa en robots baratos y pretende acercar a las aulas estos nuevos sistemas.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 13/07/2015

El Equipo Pegasus ha creado un vehículo autónomo que utiliza algoritmos y técnicas de visión artificial así como los datos de varios sensores, con el fin de seguir los carriles de una carretera, realizar maniobras de aparcamiento y sortear obstáculos bloqueando su camino. Lo interesante de este proyecto es que en primer lugar utiliza un teléfono Android como la unidad que se encarga del procesamiento de imágenes y decisión. Es responsable de transmitir de forma inalámbrica instrucciones para un Arduino que controla los aspectos físicos del vehículo. En segundo lugar, los diversos componentes de hardware ( es decir, sensores , motores , etc.) están programáticamente gestionados de una manera orientada a objetos, una librería desarrollada para Arduino, que permite a los desarrolladores sin experiencia en los sistemas integrados de realizar muy facilmente sus tareas sin preocuparse por los detalles de implementación de bajo nivel. Todos los detalles del proyecto están en su web y también está disponible el código fuente en GitHub por si quieres echar un vistazo.
Leer más