Publicado por Oscar Gonzalez
en Robótica
el 23/05/2011
Publicado por Oscar Gonzalez
en Robótica
el 23/05/2011
Tal y como hemos comentado, el pasado mes de Abril tuvo lugar una nueva ediciónde la CyberTech, una competición organizada por el departamento de Automática, Ingeniería Electrónica e Informática Industrial de la Escuela Técnica Superior de Ingenieros Industriales de la Universidad Politécnica de Madrid.Alli estuvo el equipo BricoGeek y hoy nos traen un pequeño resumen que podreis ver al completo en su web.
Enhorabuenas chicos, estupendo trabajo!!!
Leer más
Publicado por Alex TC @TCRobotics
en Robótica
el 20/05/2011
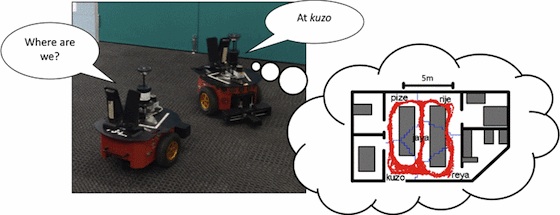
Desde la universidad de Queensland os traigo otra revolución en el campo de la robótica. Ya hemos visto robots colaborativos que se comunican, se envían datos por bluetooth, infrarojos, etc. Intercambio de datos y protocolo de comunicación conocido previamente por los robots.
Pero estos prototipos con los que está investigando Ruth Schulz y sus colegas australianos utilizan lenguaje. Crean palabras para localizaciones, direcciones y distancias. Mediante juegos se enseñan unos a otros las palabras, e incluso nombran sitios a los que físicamente no pueden llegar, y aprenden mediante comunicación, la localización de posiciones en las que nunca han estado, pero si sus compañeros.
Conozcamos un poco mejor estos prototipos.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 19/05/2011
El proyecto Galatea creado por Ángel Sánchez y Javier Suvires, abarca el desarollo de un robot cuadrupedo desde su parte más mecánica y electronica hasta su software en sus diferentes capas. Es un robot educativo ideado para la mayoria de los aficionados a la electrónica y la informática pudiendose abarcar tantas areas como el usuario desee, empezando por la su montaje, el desarrollo de firmware o la realización de aplicaciones en pc con comunicaciones con el robot.
Para la puesta en marcha de este robot no se necesita ningun conocimiento previo, y durante su montaje se obtienen nociones básicas de mecánica, electronica y programación. Galatea puede programarse fácilmente vía USB.
No os perdais más detalles a continuación...
Leer más
Publicado por Alex TC @TCRobotics
en Robótica
el 16/05/2011
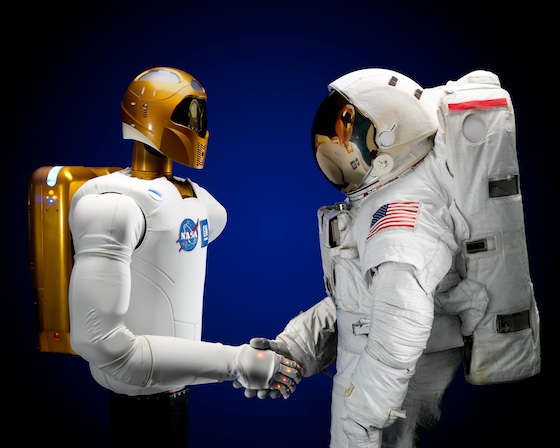
Aprovechando que hoy se ha lanzado a las 14:56 el transbordador espacial Endeavour, os traigo un par de robots especiales y espaciales.
La idea de poner un robot humanoide en el espacio no es nueva, el cine ya nos ha deleitado la vista a los que nos gustan los robots, con modelos como C3PO en Star Wars, los Cylon de Battlestar Galáctica, Data de Star Trek y un largo etcétera.
Un robot humanoide aporta la ventaja de la telepresencia, la versatilidad del movimiento y características humanas. Si un humano va a controlar un robot, qué mejor manera que haciendo que el robot se parezca a un humano. Esto incluye un par de brazos con seis grados de libertad, visión estereoscópica y, sobre todo unos actuadores casi tan perfectos como las manos humanas. Al crearlos a imagen y semejanza de los humanos les abrimos la posibilidad de usar cualquier tipo de "herramienta para humanos" como por ejemplo un destornillador, lo que permite que sustituyan a humanos en tareas peligrosas como las realizadas fuera de las naves.
Sin embargo, hasta febrero de este año no se había puesto ningún humanoide en el espacio.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 29/03/2011
Los ingenieros del ETH en Zürich (Suiza) han hecho todo tipo de experimentos con pequeños quadcopters orientados al control de sistemas dinámicos, los cuales he ido publicando por aqui para el gozo de todos nosotros. Ahora bien, despues de varios proyectos realmente impresionantes parece ser que han subido el liston aún más si cabe y ahora han hecho que se pueda jugar al juego Ping Pong entre uno mismo y el quadcopter o incluso dos quadcopter solos...
El experimento forma parte del Flying Machine Arena, una iniciativa conjunta de varios laboratorios de investigación, y que dispone de un costosísimo (~0.5M€) sistema de captura de movimientos que proporciona la posición 3D de una serie de reflectores colocados en los quadrotors con una precisión cercana al milímetro. Ahora a ver quien se anima a hacer lo mismo con Arduino... espero comentarios! hehe
Como siempre, no os perdais el video a continuación... Gracias Carlitos!
Leer más