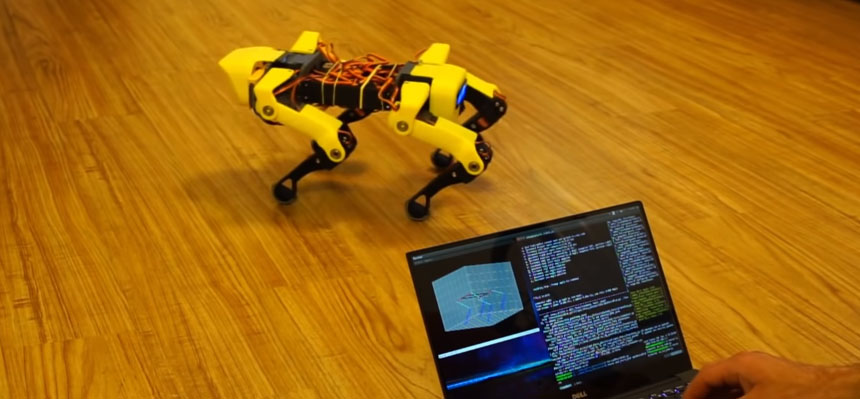
Desde la salida de Spot, el robot de Boston Dynamics, los robots cuadrúpedos sin duda se han puesto de moda y no es para menos. Pero lo difícil es conseguir movimientos fluidos ya que éste proyecto requiere de bastante matemática y programación. Además si quieres replicarlo utilizando los mismos motores que los pros, te gastarás una buena salsa... Pero los servomotores son baratos y ésta réplica de Spot Mini es lo que utiliza. Además el control lo realiza una Raspberry Pi mediante un código propio escrito en C++ y Python (disponible en Github) sobre una plataforma ROS. Ahí es nada, pero el resultado desde luego es muy bueno ya que puede caminar bastante bien, como puedes ver el en vídeo que te dejo a continuación.
Enlace: Spot Mini Raspberry Pi
 PirateBox: Una caja para compartir archivos
PirateBox: Una caja para compartir archivos
 Brazos robots colaborando para imprimir grandes estructuras en 3D
Brazos robots colaborando para imprimir grandes estructuras en 3D
 Cómo configurar tu Raspberry Pi sin monitor ni teclado
Cómo configurar tu Raspberry Pi sin monitor ni teclado
 Brazo robot de 6 ejes impreso en 3D y Open Source
Brazo robot de 6 ejes impreso en 3D y Open Source
 PCBmodE: Cómo hacer placas PCB artísticas
PCBmodE: Cómo hacer placas PCB artísticas
 Imprimiendo las ruedas de tu robot
Imprimiendo las ruedas de tu robot