Publicado por Oscar Gonzalez
en Arduino
el 14/07/2017
Publicado por Oscar Gonzalez
en Arduino
el 14/07/2017
De todos los miles de proyectos donde puedes ver un Arduino, éste es posiblemente el más friki que vas a ver hoy. Ésta máquina de escribir donde la ves, está modificada con un Arduino y una placa PCB hecha a medida para registrar cada tecla. El conjunto se conecta al PC y se identifica como un teclado y permite, por ejemplo, programa en C usando VIM (que ya tiele tela de por sí) usando una máquina de escribir. #mindblow
Leer más
Publicado por Oscar Gonzalez
en Linux
el 01/08/2014
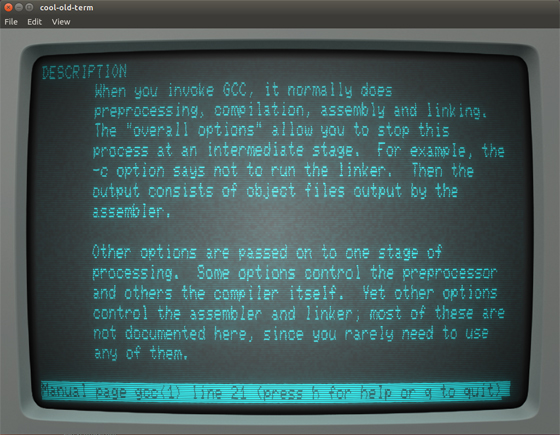
Se ven emuladores de terminal de todos los tamaños y formas para Linux, pero nada como esto. Cool-old-term es uno de aspecto totalmente retro con el estilo y visualización de las antiguas pantallas de tubo. Se puede modificar hasta al saciedad con bastante parámetros como el color de fondo o de las letras o incluso cuanto "falla" el monitor. Se puede instalar desde su repositorio en Github tras instalar unas dependencias.
A continuación os dejo un vídeo de su funcionamiento e instrucciones para instalarlo.
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 18/03/2011
Las posibilidades de Arduino son casi infinitas y una de las cosas más interesantes es poder controlarlo desde otros lenguajes como por ejemplo PHP. Os dejo un interesante enlace que muestra en detalle cómo controlar una placa Arduino desde PHP montado sobre apache en Ubuntu. Básicamente el truco reside en abrir el puerto serial desde PHP y así poder comunicarse con la placa.
Enlace a continuación...
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 05/11/2010
He hablado en otra ocasión del impresionante robot QBO, un pequeño robot que pretente ser el nuevo R2D2 y que aparte de utilizar Linux com plataforma base para su funcionamiento, es totalmente Open Source. La gente de The Corpora, los creadores del QBO, está haciendo grandes avances tal y como se muestra en un video publicado en su canal de YouTube, donde podemos ver el pequeño QBO utilizando SLAM (localización y mapeo simultáneo) en tiempo real para encontrar un camino correcto. Durante ese proceso, el robot reduce su velocidad hasta 4 veces. Una vez mapeado el lugar, aumenta su velocidad para recorrer el camino que ha aprendido de la forma más rápida y eficiente.
Me parece impresionante el trabajo y seguro que veremos muchas más cosas muy pronto sobre éste estupendo robot. No os perdais el video!
Leer más
Publicado por Oscar Gonzalez
en Linux
el 08/07/2010
Os dejo un interesante video que muestra cómo instalar Ubuntu Linux en un HTX Nexus One. Video y enlace a continuación...
Leer más