Publicado por Oscar Gonzalez
en RobĂłtica
el 24/03/2011
Publicado por Oscar Gonzalez
en RobĂłtica
el 24/03/2011
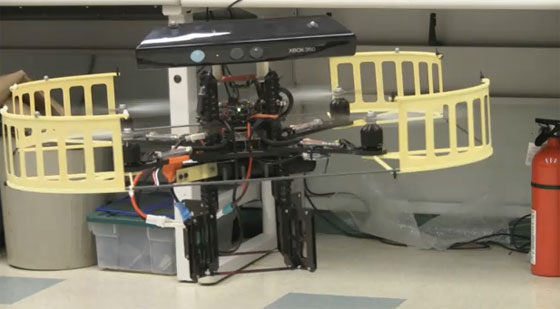
Desde la salida del driver de libre OpenKinect se han visto ya muchas aplicaciones utilizando este maravilloso sensor. Una de sus aplicaciones encuentra lugar aquí, en un proyecto llamado STARMAC del laboratorio de sistemas híbridos de la Universidad de Berkeley en California. Se trata de un pequeño quadcopter que mediante un sensor Kinect es capaz de procesar la imagen y conseguir desplazarse de forma autónoma. Todo el calculo y procesamiento se realiza en el mismo quadcopter mediante una placa base con un procesador Intel Atom 1.6 GHz functionando, como no podía ser de otra forma, con Linux (Ubuntu 10.04).
No os perdais el alucinante video a continuación...
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 23/03/2011
Usando unos guantes modificados ahora ya puedes llevar el modelado 3D al extremo. El secreto reside en una placa Arduino que recoje las señales del guante para poder ser interpretadas por el ordenador. No sé si es práctico de utilizar pero desde luego es muy vistoso. No os perdais el video...
Gracias Javier por la noticia!
Leer más
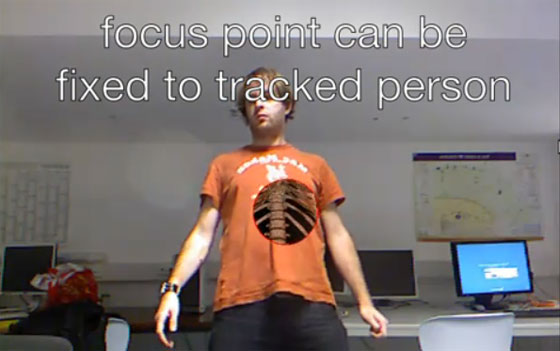
Desde la salida del driver open source para Kinect, sus aplicaciones no dejan de crecer. Aqui os dejo una muy interesante que simula los rayos X usando Kinect para ver el esqueleto de tu cuerpo en tiempo real.
Video a continuación...
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 18/11/2010
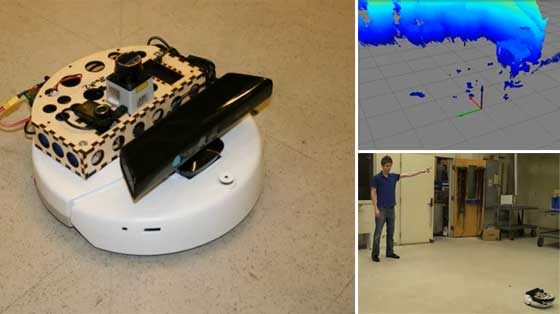
El sensor Kinect de Microsoft está que no para y tal y como anunciábamos hace pocos días, no paran de llover aplicaciones nuevas utilizando el driver Open Source para Kinect recientemente creado por un Español. Ahora le toca el turno a éste robot Roomba (también llamado iRobot) que mapea su entorno en 3D mediante Kinect y utiliza SLAM para posicionarse.
Impresionante video a continuación...
Leer más
Tras el reciente anuncio del driver Open Source para Kinect desarrollado por un Español y despues de haber visto Kinect por dentro, no paran de llover aplicaciones de todo tipo que utilizan éste estupendo sensor de Microsoft. Lo último es éste que utiliza el sensor Kinect para representar una imagen tridimensional basándose en los datos recuperados. Es realmente impresionante verlo y además en tiempo real! Está basado en el trabajo original de Hector Martin que ha mostrado las especificaciones del protocolo USB de Kinect. El autor utiliza un programa realizado en C++ con un VR toolkit própio ambos disponibles en su web.
No os perdais el video altísimamente recomendado a continuación... Y ahora, quíen se anima a probar Kinect? Estamos ansiosos por verlo! :)
Leer más