Cómo construir un sencillo robot que evita obstáculos con Arduino
Publicado por Oscar Gonzalez
en Arduino
el 21/08/2020
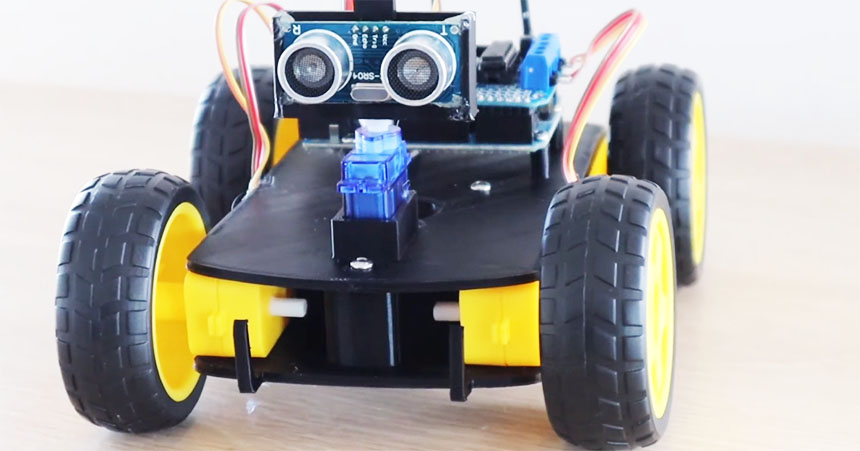
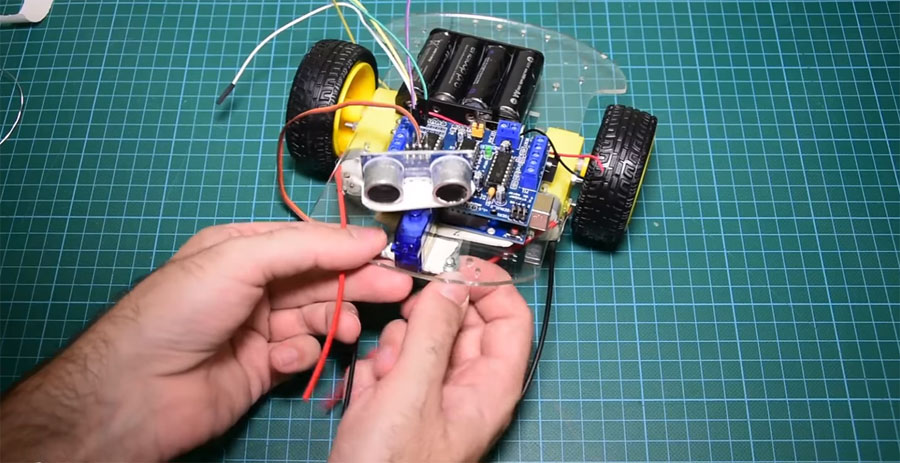
Crear tu propio robot es como magia y altamente gratificante cuando lo ves funcionar por primera vez. Uno de los robots más sencillos que puedes montar es usando un chasis ya construido para solo tener que dedicarte a la parte de control y no tanto a la construcción del mismo. En el vídeo que te dejo a continuación se explica en detalle cómo construir un robot que es capaz de esquivar obstáculos gracias a un sensor de distancia SR04 y todo esto controlado con una placa Arduino UNO.