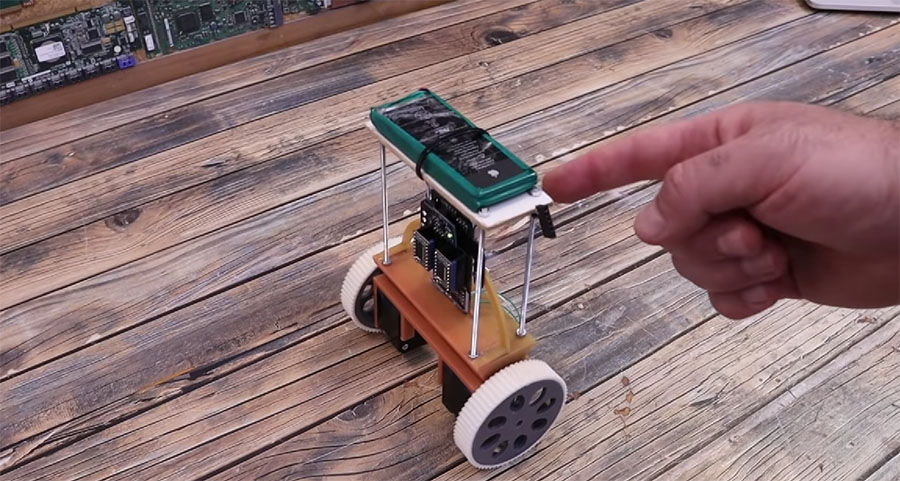
También se llaman robots balancines y su características principal es que solo tienen dos ruedas y pueden mantenerse en equilibrio sobre ellas. A nivel teórico, funcionan como un péndulo invertido y gracias a un Arduino junto con una unidad de medición inercial MPU-6050, se puede construir un robot de éste tipo de forma muy barata y sencilla.
 Scooterputer: Centralita de monitorización casera con Arduino
Scooterputer: Centralita de monitorización casera con Arduino
 (Video) Robot araña hexápodo escribiendo con un lapiz
(Video) Robot araña hexápodo escribiendo con un lapiz
 Zenbot es un tongue musical electrónico controlado con Arduino
Zenbot es un tongue musical electrónico controlado con Arduino
 Cómo configurar WiFly shield con Arduino
Cómo configurar WiFly shield con Arduino
 Simulador de redes Wifi públicas usando ESP8266 y Arduino
Simulador de redes Wifi públicas usando ESP8266 y Arduino
 Estación de soldadura casera con caja impresa en 3D
Estación de soldadura casera con caja impresa en 3D