LibrerĂa PID con Arduino
Publicado por Andoni Diaz Puerta
en Arduino
el 19/04/2011
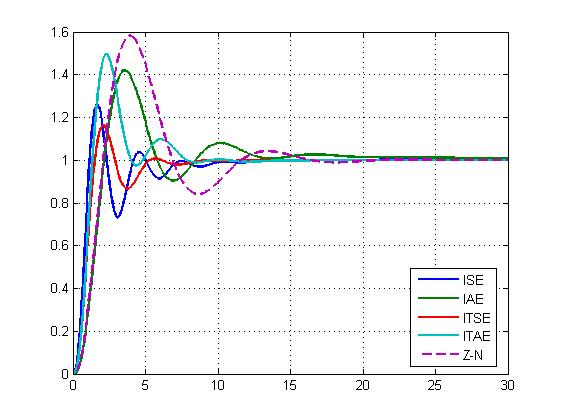
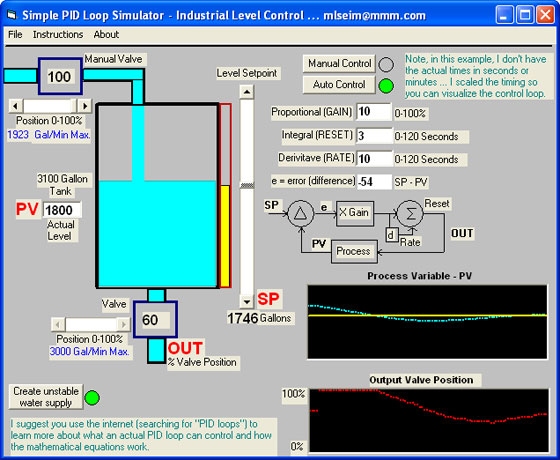
Como ya sabrán la mayoría de los que leen este blog a diario, el algoritmo PID (o Proporcional Integral Derivativo), es un elemento bastante usado en sistemas autómatas (de una manera u otra), en los cuales este algoritmo cobra bastante importancia en las funciones de re-alimentación, además de provocar que la curva de respuesta sea mucho mas suave que si usamos un sistema alternativo.
La idea es haceros un poco de resumen sobre el panorama de librerías ya diseñadas que nos permitan crear un control PID sencillo (relativamente), sin tener que programarlo desde 0.
Arduino no se queda atrás!