Programa de ejemplo de control PID en VB6
Si estás desarrollando un quadcopter pero te encuentras ya con el "problema" de la calibración del control PID estás de suerte. He encontrado un interesante enlace al código fuente de un pequeño programa hecho en Visual Basic 6 que muestra en todo su esplendor cómo funciona un control PID.
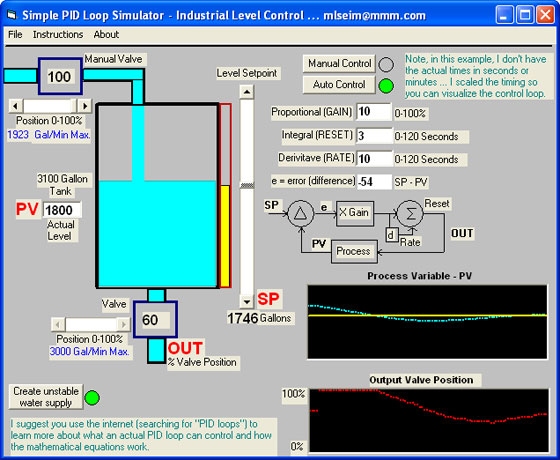
Un PID (Proporcional Integral Derivativo) es un mecanismo de control por realimentación que calcula la desviación o error entre un valor medido y el valor que se quiere obtener. Es básicamente lo que se utiliza para la estabilización de quadcopters, hexacopters etc. Para entender cómo funciona y sobre todo cómo reacciona cambiando sus parámetros de control, la aplicación simula un tanque con una entrada de líquido, una salida y un nivel de líquido que queremos mantener. En función del calculo y modificación de las tres variables del PID (Proporcional, Integral y Derivada), podremos ver las distintas respuestas del algoritmo y entenderemos qué hace cada parámetro. Es interesante ver la respuesta del ciclo de llenado/vaciado según vamos modificando las variables y nos puede dar una idea de la respuesta que queremos para nuestro objeto volador.
No os perdais el enlace y ya me contareis qué tal! ;)