No es ni el primero ni el último robot balanceador que he publicado aquí y la verdad es que es un proyecto intermedio y muy vistoso una vez que lo ves funcionando.
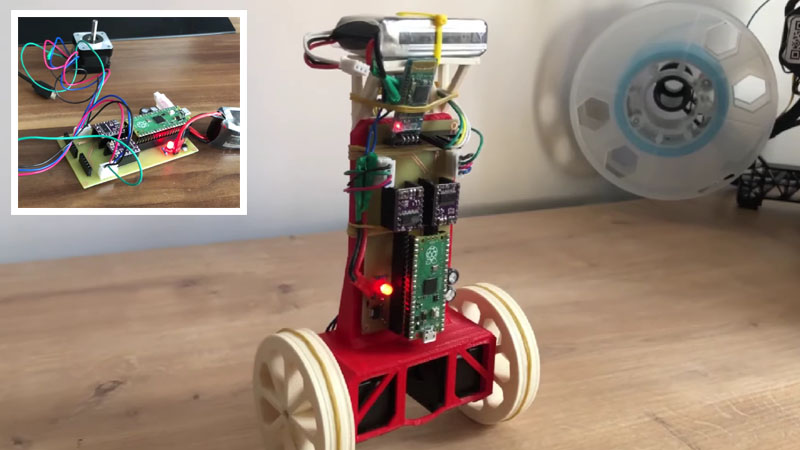
Estos robots miden la inclinación con un acelerómetro y mediante un control PID mueven los motores que a su vez tienen encoders para saber su posición exacta. Lo puedes hacer con motores DC convencionales, pero es mucho más cómodo hacerlo con motores paso a paso como el que te dejo a continuación, ya que no necesitas los encoders, asumiendo que están en la posición correcta.
 Robot Furby convertido en Amazon Alexa
Robot Furby convertido en Amazon Alexa
 Cabeza de robot Bender impresa en 3D con múltiples funciones
Cabeza de robot Bender impresa en 3D con múltiples funciones
 Imprimiendo las ruedas de tu robot
Imprimiendo las ruedas de tu robot
 SmartKnob es el potenciómetro háptico con pantalla más épico que verás hoy
SmartKnob es el potenciómetro háptico con pantalla más épico que verás hoy
 El robot lavapelo de Simone Giertz
El robot lavapelo de Simone Giertz
 Réplica del brazo robot UR8 impreso en 3D
Réplica del brazo robot UR8 impreso en 3D