Publicado por Oscar Gonzalez
en Modelismo
el 13/06/2012
Publicado por Oscar Gonzalez
en Modelismo
el 13/06/2012
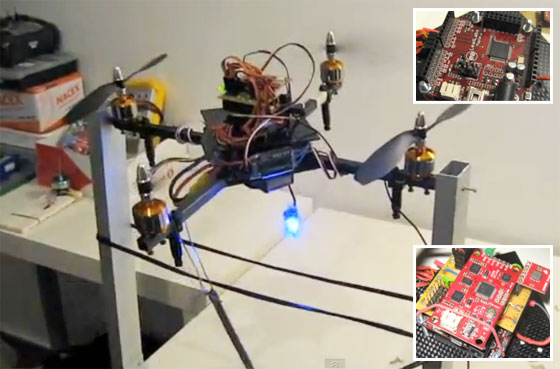
Nuestro amigo Xoan Carlos desde Gondomar nos comenta la finalización de su proyecto de Quadcopter casero. Es un impresionante aparado del que ya hemos hablado con anterioridad y que utiliza una placa Maple junto con una unidad de medición inercial RAZOR 9 DOF para su control. Las primeras pruebas de vuelo fueron muy satisfactorias y vuela realmente muy bien. Como siempre, el ajuste del PID lleva su tiempo pero Xoan ya está trabajando en una shield para montarlo todo de forma más sólida. Estupendo trabajo Xoan!
No os perdais más detalles a continación...
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 01/02/2012
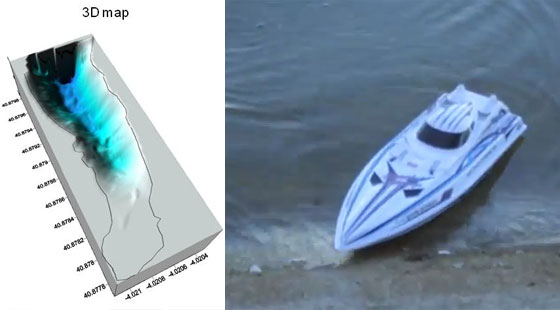
Riccardo Rocca nos envía desde Madrid su último proyecto llamado Roboat 2011. Es un barco robot capaz de seguir una ruta utilizando Arduino, un GPS y una brújula electrónica. La ruta se puede configurar desde un mapa en Google Earth y transferir a la memoria interna de Arduino. Durante la navegación, Roboat envía a un portátil las informaciones de su ubicación y orientación y estas son actualizadas sobre el mapa de Google Earth en tiempo real. Roboat recoge y envía también mediciones de la profundidad del agua que al final se pueden utilizar para generar un mapa batimétrico.
No os perdais el enlace a su web, esquemas y vídeo a continuación... Gracias por enviar tu proyecto Riccardo!
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 30/01/2012
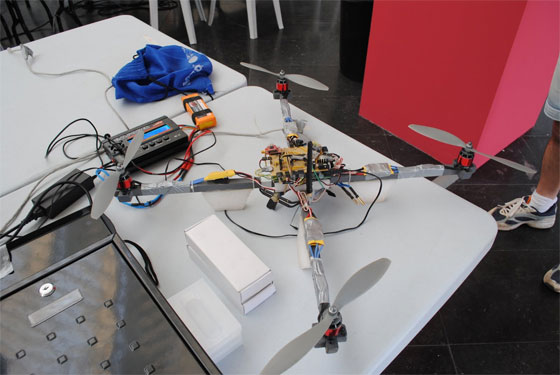
Xoan Carlos nos envía un vídeo de las primeras pruebas de equilibrio de un quadricoptero hecho con la placa Maple y el sistema de medición inercial 9DOF Razor IMU-AHRS. También incluye un sensor de presión barométrica BMP085 que servirá más adelante para el control de altitud. Hemos visto por aquí una infinidad de quadcopter con Arduino y la verdad es que me llama la atención que Xoan utiliza un a placa Maple dado que es bastante más potente que un Arduino. Seguiremos de cerca este proyecto del que seguro tendremos más noticias en breve. Enhorabuena xoan, excelente trabajo!
No os perdais el vídeo a continuación...
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 14/11/2011
No os perdais este impresionante todoterreno de radiocontrol que funciona a vapor. Pesa un poco más de ocho kilos y según se puede ver en el vídeo tiene un impresionante sistema de suspensión aparentemente muy blando. No es que corra mucho pero desde luego la realización es impecable. Vídeo sin desperdicio a continuación...
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 03/08/2011
Este quadcopter llamado ATROPOS es realmente impresionante. Aparentemente parece un quadcopter normal pero en su interior se esconde una Fonera 2201 (un punto de acceso Wifi) con una versión modificada de GNU/Linux OpenWRT que le permite ser controlado mediante web. Una série de sensores de una Wii le proporcionan la información a la Fonera mediante los pines GPIO. Puede ser pilotado desde un canvas HTML5 utilizando intensivas llamas AJAX. Desde la Fonera y como intermediario, se encuentra un pequeño PIC 16F876 que se encarga de generar las señales PWM para los variadores aunque el control del PID lo realiza la Fonera que además, tiene una modificación en su servidor web para acelerar las peticiones HTTP utilizando la memoria RAM compartida.
Despues de esto, cómo se os ha quedado el cuerpo? Por supuesto, no os perdais los videos que no tienen desperdicio. El autor en breve, sacará más información...
Leer más