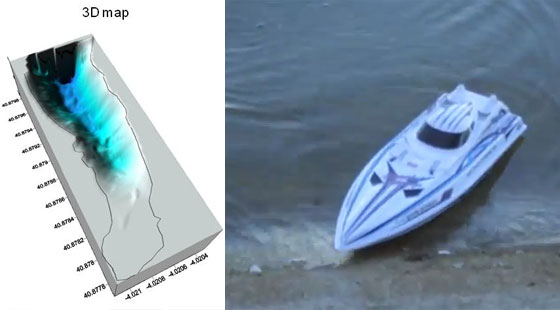
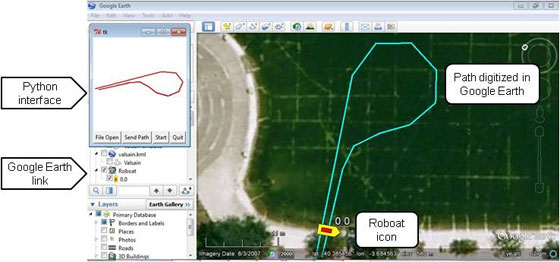
Riccardo Rocca nos envía desde Madrid su último proyecto llamado Roboat 2011. Es un barco robot capaz de seguir una ruta utilizando Arduino, un GPS y una brújula electrónica. La ruta se puede configurar desde un mapa en Google Earth y transferir a la memoria interna de Arduino. Durante la navegación, Roboat envía a un portátil las informaciones de su ubicación y orientación y estas son actualizadas sobre el mapa de Google Earth en tiempo real. Roboat recoge y envía también mediciones de la profundidad del agua que al final se pueden utilizar para generar un mapa batimétrico.
No os perdais el enlace a su web, esquemas y vídeo a continuación... Gracias por enviar tu proyecto Riccardo!
Enlace: Roboat 2011
Video
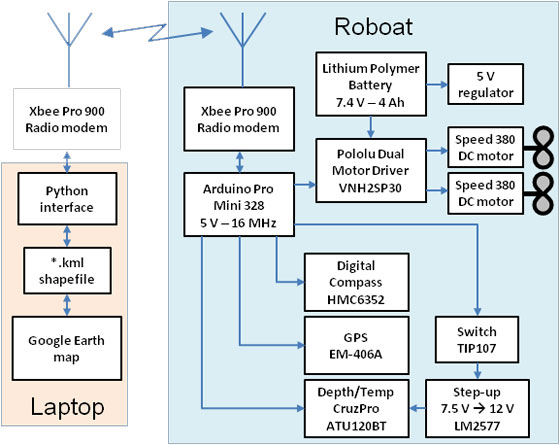
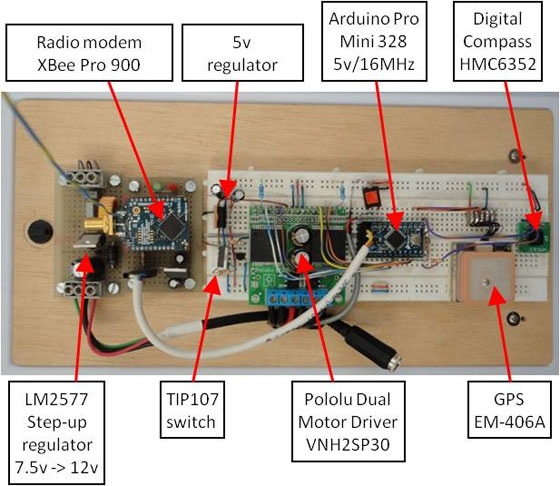
Los principales dispositivos utilizados son:
- Arduino Pro Mini 328 5v/16MHz
- GPS EM-406°
- Digital Compass HMC6352
- Radio modem XBee Pro 900
- Pololu Dual Motor Driver VNH2SP30
- Depth/Temperature transducer CruzPro ATU120BT



 Cortador de Foam con hilo caliente para alas de avión RC
Cortador de Foam con hilo caliente para alas de avión RC
 Generador de gasolina casero para alimentar una Raspberry Pi y Arduino
Generador de gasolina casero para alimentar una Raspberry Pi y Arduino
 Bluetooth + GPS + ActionScript sin microcontrolador
Bluetooth + GPS + ActionScript sin microcontrolador
 Motores Brushless RC
Motores Brushless RC
 Tractor de radio control casero desde cero
Tractor de radio control casero desde cero
