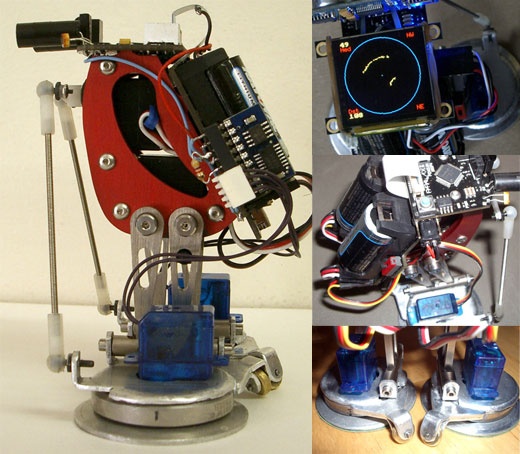
Aqui un estupendo proyecto del usuario Interact del foro de Parallax. Se trata de su propia version de un robot pinguino bípedo que usa un controlador Pololu de Parallax para controlar unos servomotores. También dispone de un sistema de sonar que mediante una pantalla uOLED-180 es capaz de interpretar los obstáculos que encuentra a su alrededor.
Me ha llamado la atención la parte mecánica del bíbedo ya que usa un interesante sistema de balancedo con un servomotor central con dos brazos agarrados a las piernas. También tiene capacidad para girar sus pies y asi poder cambiar de dirección en cualquier momento. El video muestra que es muy estable cuando camina incluso sin tener ningún sistema complejo de 4 servos por pierna como tiene por ejemplo el robonova o robots bípedos similares.
El video a continuación no tiene desperdicio...
Enlaces:
- Robot pinguino (parte 1)
- Robot pinguino (parte 2)
- Robot pinguino (parte 3)
Relacionado:
- Robby: El robot bípedo español
- (Video) Mowgi: El robot que salta como una rana
- (Video) Robot ultra pequeño con 8Kb de memoria
- Robot bípedo de radiocontrol
- (Video) Competición de robots con juego "Operación"
- (Video) Roller-Walker: El robot sobre patines
- (Video) Robot Hexapod con reconocimiento facial
- (Video) Robot cienpies controlado por PIC
 Un diminuto robot para imprimir en 3D que funciona con MicroPython
Un diminuto robot para imprimir en 3D que funciona con MicroPython
 Cómo hacer un robot serpiente impreso en 3D
Cómo hacer un robot serpiente impreso en 3D
 Espectacular robot bípedo que no utiliza electrónica de control
Espectacular robot bípedo que no utiliza electrónica de control
 Robot BlueRover: Ganador del Digilent Design Contest
Robot BlueRover: Ganador del Digilent Design Contest
 KITtyBot: Un robot cuadrúpedo hecho con Arduino
KITtyBot: Un robot cuadrúpedo hecho con Arduino
 Robot KUKA ayudando a crear esculturas
Robot KUKA ayudando a crear esculturas
