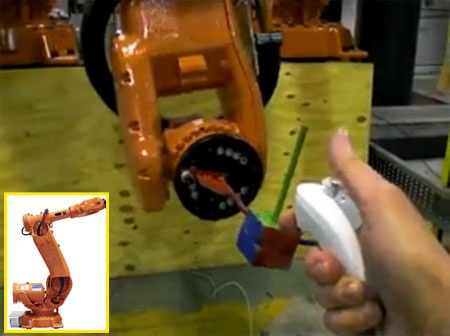
El amigo Jesus Gil nos env�a un interesante proyecto que ha realizado con la placa Arduino Duemilanove de nuestra tienda online. Se trata de un brazo robot IRB 6640 de ABB que es controlado mediante el Wii Nunchuk. El Arduino recibe y analiza los datos del aceler�metro del mando y los env�a por el puerto s�rie con la ayuda de un peque�o conversor MAX232.
No os perdais el video a continuaci�n...
Relacionado:
- (Video) Arduino controlando servos con Wii Nunchuk
Algunos datos m�s sobre su funcionamiento:
El Arduino se encarga de leer el aceler�metro del Nunchuck v�a serie. Concretamente lee los valores decimales del aceler�metro/inclin�metro en sus ejes X, Y y Z. Tambi�n lo hace del joystick en su movimiento sobre su eje X, y del bot�n Z.
Dichos valores se transfieren al robot (TTL a RS232) por su puerto s�rie COM1. Una rutina programada en el robot realiza la conversi�n trigonom�trica desde grados Euler a cuaterniones. Los cuaterniones forman parte de las instrucciones de movimiento de robot, y se usan para darle rotaci�n a la herramienta que el robot tiene definida en su mu�eca. El �ltimo paso es ejecutar la posici�n continuamente y refrescar los valores de los cuaterniones cada vez que se produce el bucle del movimiento.
 Máquina de dibujo con Arduino controlada con Android
Máquina de dibujo con Arduino controlada con Android
 CAN Shield: Interfaz CAN con Arduino y MCP2515
CAN Shield: Interfaz CAN con Arduino y MCP2515
 Cómo hacer el despertador LED definitivo con Arduino (requiere puntería!)
Cómo hacer el despertador LED definitivo con Arduino (requiere puntería!)
 Más potencia con Arduino Galileo y Arduino Tre
Más potencia con Arduino Galileo y Arduino Tre
 Resumen Arduino Barcamp Menorca 2011
Resumen Arduino Barcamp Menorca 2011
 Amarino: Cómo utilizar Arduino con Android
Amarino: Cómo utilizar Arduino con Android