Publicado por Oscar Gonzalez
en RobĂłtica
el 31/01/2024
Publicado por Oscar Gonzalez
en RobĂłtica
el 31/01/2024
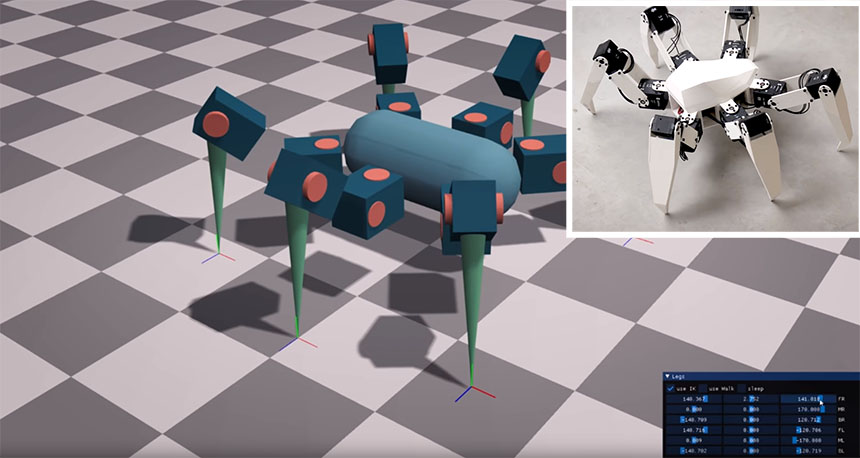
Quizás uno de los más interesantes y vistosos robots que se pueden construir sea el hexápodo, o robot araña. Son robots que llevan una cantidad importante de servos para poder funcionar y que ademas tienen el añadido ser complejos en cuanto a movimiento, ya que para conseguir un movimiento fluido es necesario utilizar cinemática inversa. En lugar de mover ángulos de servos, se posiciona la punta de cada pata en un espacio tridimensional. En el vídeo que os dejo a continuación se puede ver todo el proceso de construccion que comienza por el desarrollo de un modelo en tres dimensiones y su patrón de movimiento. Luego con un poco de impresión 3D y algo de mágica, el resltado final es realmente increible. Por si te interesa, el código fuente está disponible en su Github.
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 15/04/2020
Cuando me refiero a un reloj mecánico, no hablo del los clásicos con partes mecánicas, sino de uno mecánico-digital. Como los de antes hechos de segmentos que tenían como pestañas que podían girar para mostrar los números. Eso se puede replicar con servos colocados estratégicamente y con la ayuda de una placa Arduino. Es es exactamente lo que vas a ver en el vídeo que te dejo a continuación.
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 26/04/2017
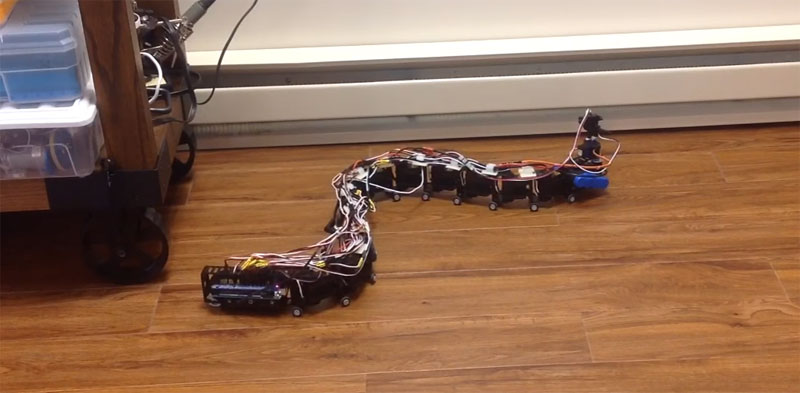
Todos los robots tienen cierta mágia una vez que los terminas y los ves funcionar, pero quizás unos de los más impresionantes de ver son los robots en forma de serpiente como éste que se llama The Lake Erie Mamba. Está compuesto por 12 segmentos que le permiten utilizar varias estratégias para desplazarse. El control se hace con una placa Arduino y un pequeño emisor de radio con 4 botones. El movimiento desde luego está muy logrado.
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 20/04/2017
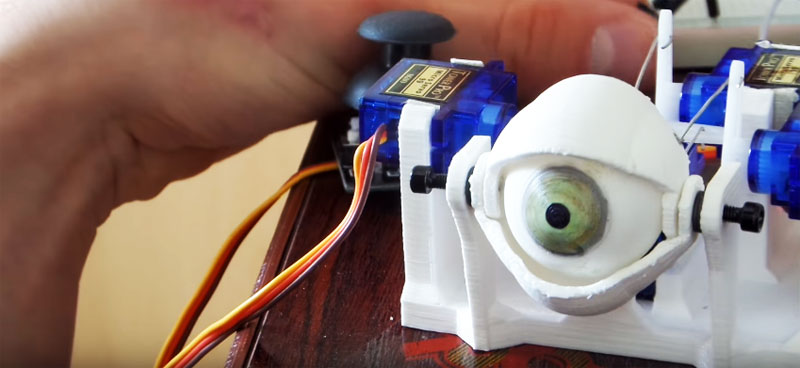
En el cine, mucho antes de ponerse tan de moda los efecto CGI, se utilizaban mucho las marionetas mecánica o animatronics, unos dispositivos para crear un personaje o atrezo capaz de moverse. Casos con Los Gremlins, Terminator o Jurassic Park, marcaron toda una era de estas alucinantes máquinas. Muchos de los muñecotes usan ojos y es un proyecto relativamente sencillo y barato de hacer si te quieres introducir en éste apasionante mundo de los animatronics. Os dejo a continuación todos los detalles para montar un pequeño ojo y también unos vídeos de los clásicos del cine y cómo se hicieron que os aseguro no tienen desperdicio.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 17/02/2017
El MX-Phoenix es impresionante y enorme un robot hexápodo basado en 6 potentes servos Dynamixel MX-64T y 12 servos MX-106T. Es una evolución de otro robot hexápodo de Lynkxmotion pero éste está controlado por una placa Teensy 3.6, muy necesaria para realizar la tremenda cantidad de cáculos que hay que realizar para mover éste tipo de robots. En el vídeo que os dejo a continuación, se puede ver la excelente suavidad de movimiento que ha conseguido su autor y también el tamaño del robot que precisamente no es pequeño. aunque parezca que no, todo el cuerpo y las patas están impresas en 3D con ABS. Con un tratamiento con acetona, el acabado es excelente.
Leer más