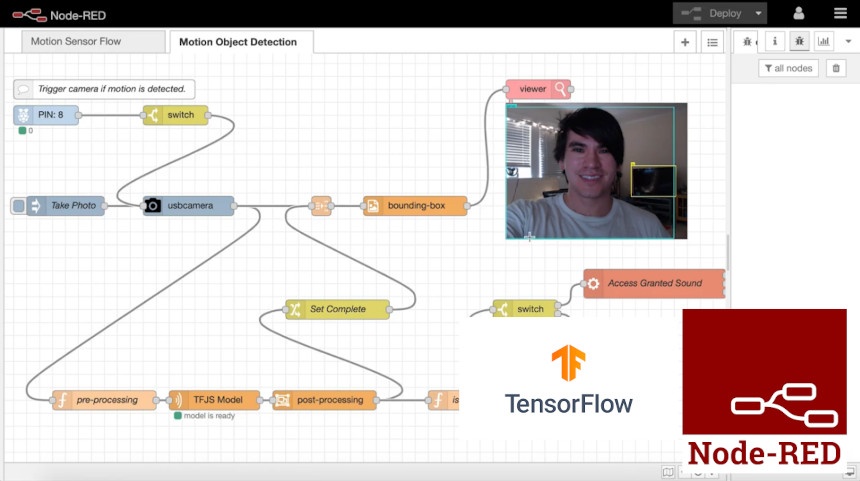
La potencia y flexibilidad de Node-Red está más que clara y si todavía no conoces el sistema, te recomiendo encarecidamente que te pongas a ello. Node-Red permite crear una gran variedad de aplicaciones mediante bloques con una mínima o nula programación. Cada bloque tiene una funcionalidad y con eso, te permite ampliar sus funcionalidades casi hasta el infinito.
Una funcionalidad muy interesante es utilizar TensorFlow, la librería que permite crear modelos de Machine Learning así poder por ejemplo reconocer todo tipo de objetos y actuar en consecuencia. Esto lo podrás utilizar tanto en una Raspberry Pi o incluso en una NVIDIA Jetson Nano. En el vídeo que te dejo a continuación, podrás ver en detalle cómo se instala y sobre todo cómo se utiliza dentro de Node-Red.
Leer más
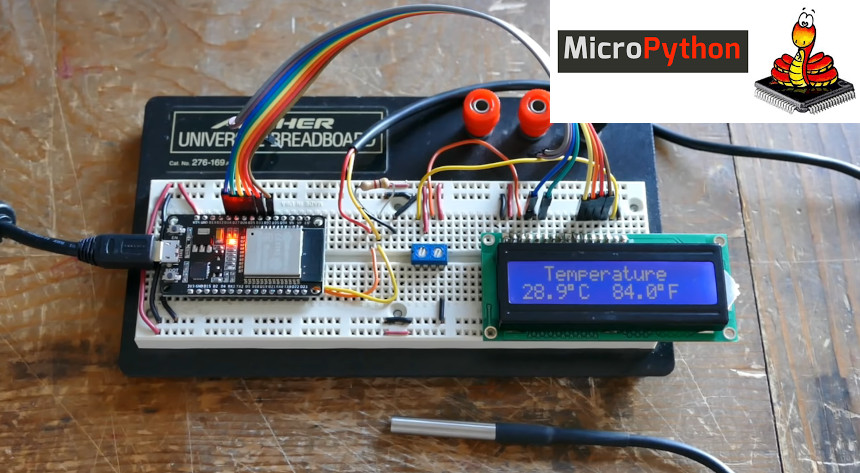
A éstas alturas tenemos bastante claro cómo programar una placa ESP32 ya que el entorno de Arduino nos permite hacerlo. Ya sabes que con el IDE de Arduino se programa en C/C++ y para el que nunca ha programado puede ser un lenguaje intimidante. Gracias a la gran potencia de los microcontroladores de tipo ESP32, podemos cambiar la forma de programarlos y utilizar MicroPython, que es más que una versión minimizada del lenguaje Python. El lenguaje de programación Python es mucho más permisivo y tiene una sintaxis más amigable, pero para poder utilizarlo con ESP32, debemos realizar unos pasos previos que se describen en el vídeo que te dejo a continuación.
Leer más
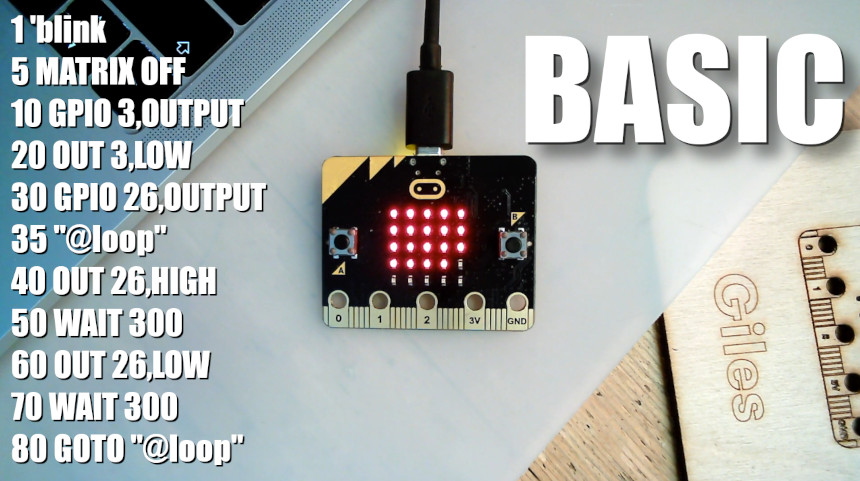
Hace no mucho, el lenguaje de programación BASIC cumplió 57 años y para muchos de nosotros el primer lenguaje de programación que hemos tocado. Los primeros ordenadores como el Commodore PET, Sinclair ZX Spectrum o el Apple 2 ya incluía éste fantástico lenguaje.
BASIC tiene mucho encanto por que tiene una sintaxis muy sencilla, fácil de aprender y podías hacer casi cualquier cosa. Hoy en día ya prácticamente no se utiliza pero sigue siendo un fantástico lenguaje de aprendizaje. En éste vídeo puedes ver cómo volver a programar en BASIC de toda la vida usando una placa Micro:Bit.
Leer más
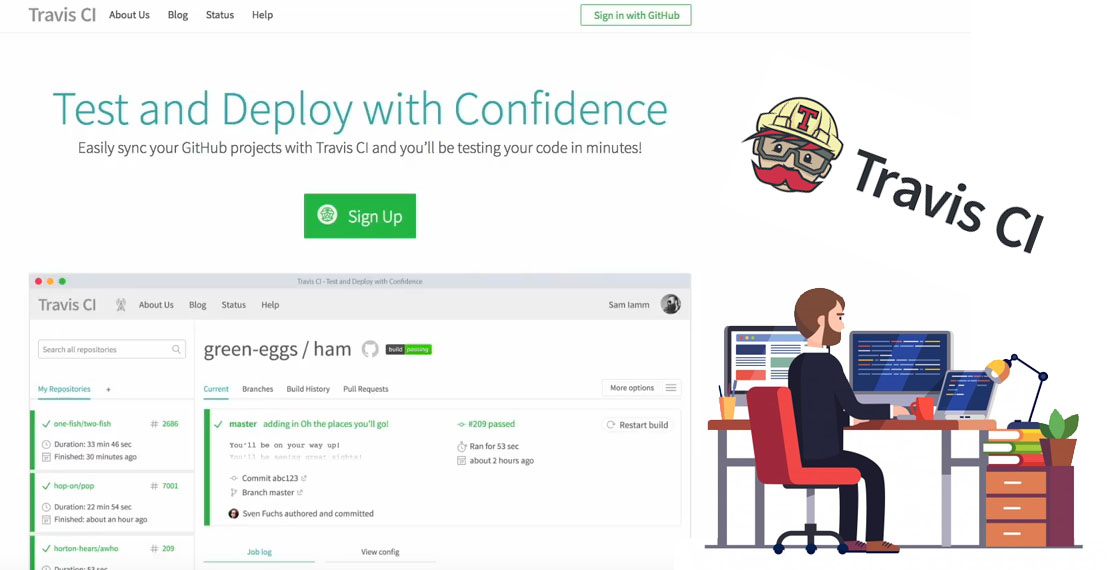
Si habitualmente desarrollas algún tipo de software o creas tus proyectos en alguna plataforma, ya te has dado cuenta que muchas veces es difícil desplegar una aplicación en un entorno de producción sin meter la pata (un fallo lo tiene cualquiera). Existen multitud de herramientas que nos facilitan la vida a los programadores y si todavía no la conoces, Travis CI es una excelente herramienta de integración continua. Travis CI es un servicio de integración continua alojado que se utiliza para crear y probar proyectos de software alojados en GitHub. Los proyectos de código abierto se pueden probar sin coste a través de su web, y los proyectos privados se pueden probar en travis-ci.com por una pequeña cantidad. A continuación te dejo un vídeo que explica como empezar con Travis CI.
Leer más

El ESP32 es un excelente microcontrolador tanto por su precio muy reducido como por su gran potencia. Pero no solo vale para conectar sensores por Wifi, debido a su gran potencia y 32-bits, también puede hacer cosas realmente geniales, lo hemos visto ejecutando tan tranquilo un emulador completo de la Nintendo NES o incluso corriendo el DOOM. Cuando programas una salida VGA, quizás lo más tedioso es la interfaz gráfica ya que requiere de una buena cantidad de programación. Para facilitarnos las cosas, existen librerías como la FabGL creada por Fabrizio Di Vittorio y que es realmente espectacular. No solo permite gestionar una salida VGA desde ESP32, sino que soporta un ratón PS/2, pued producir sonido en tiempo real y tiene todo un conjunto de funciones que se encargan de todo. Como podréis ver en los vídeos que os dejo a continuación, está realmente muy bien currada y el código es muy limpio. Os dejo el enlace a su repositorio de Github que incluye también una gran cantidad de ejemplos.
Leer más