Publicado por Oscar Gonzalez
en Modelismo
el 13/10/2022
Publicado por Oscar Gonzalez
en Modelismo
el 13/10/2022
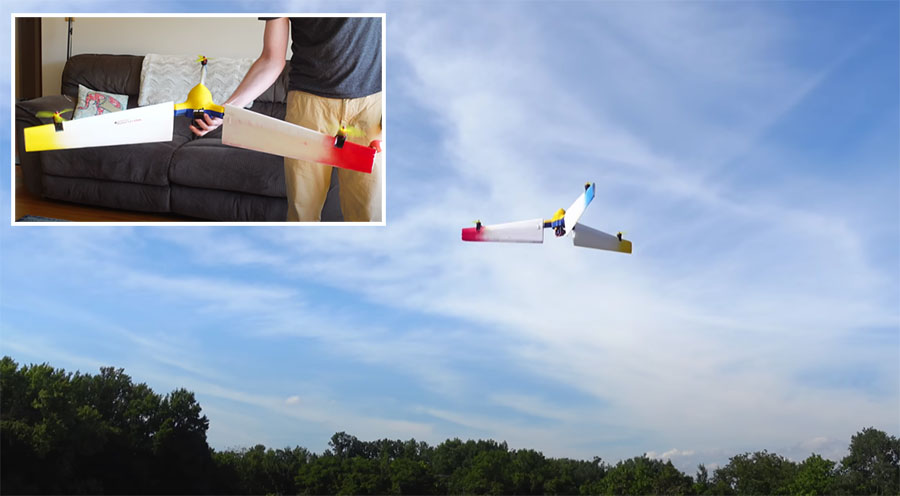
La idea de un dron con alas no es nueva pero desde luego es bastante curioso ver funciona éste tipo de aparatos. Éste del que te hablo hoy es capaz de volar en diferentes modos ya que al tener tres ala o brazos, es capaz de volar como un tricopter normal, pero cuando las inclina es capaz de girar sobre si mismo generando una fuerza de empuje suficiente para ser más eficiente cuando se mantiene en el mismo sitio.
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 25/09/2021
El 3DBenchy es probablemente el modelo más popular dentro de la comunidad de impresión 3D. No solo porque sirve para averiguar cómo de bien está afinada nuestra impresora 3D, sino que aunque hagas muchos, siempre puedes dejarlos a modo de exposición o incluso regalarlos. Creo que todos lo que tenemos una impresora 3D tenemos decenas de ellos paseando por toda la casa.
Dicho esto, y sabiendo que existen multitud de variantes, ésta que te dejo aquí no tiene desperdicio, ya que nuestro querido benchy, a pesar de ser un barquito, ha sido convertido en un avión de radiocontrol. Así es, no es que tenga la forma más aerodinámica del universo, pero con un par de potentes motores con sus hélices, mucho foam y paciencia, han conseguido hacerlo volar.
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 02/07/2018
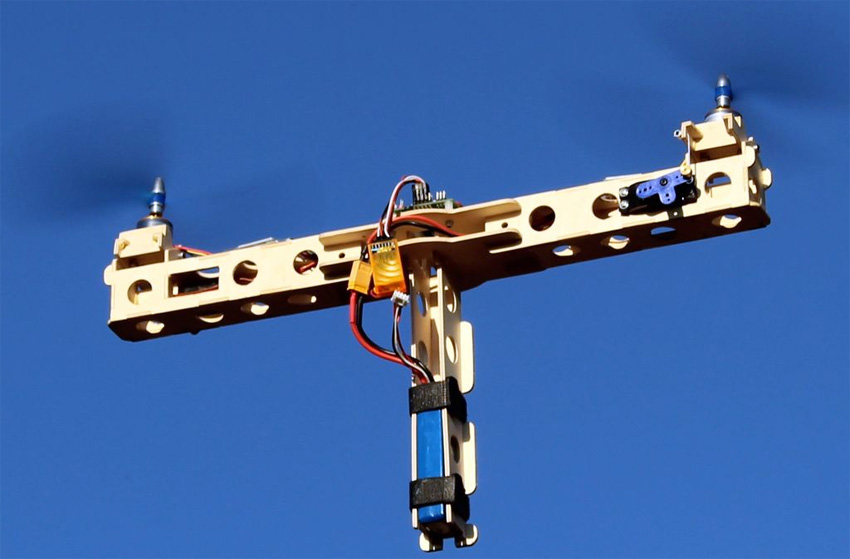
El mundo del radiocontrol es fascinante y engloba todo tipo de aparatos como coches, barcos y por supuesto drones. Éste es un poco extraño ya que tan solo tiene dos hélices y se bautiza como Dron Bicopter o también Dron Dualcopter. En vídeo que os dejo a continuación se muestra cómo se ha construido y también el enlace a las instrucciones y planos completos por si quereis montar uno.
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 01/08/2017
La impresión 3D casi no tiene límite y se pueden hacer cosas espectaculares como éste avión de radio control totalmente impreso. Está compuesto de tan solo nueve piezas y junto con un pequeño motor y batería es capaz de volar sin problema. Pero atención, no empieces a calentar tu impresora aún ya que por un lado, no es para principiantes en el mundo RC por que es bastante inestable. Por otro lado, es más bien una prueba de que se puede imprimir un avión y conseguir que vuele, pero es bastante inestable y pesado. En cualquier caso parece un proyecto muy divertido.
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 21/12/2016

Por si no conoces la trayectoria del famoso youtube Casey Neistat, te recomiendo que te pases por su canal. Empezó a crecer como la espuma hace casi dos años cuando publicaba un vídeo blog (vlog) cada día, de lunes a domingo, aunque hace pocas semanas lo ha dejado. Lo novedoso no fue eso ya que muchos otros lo han hecho, sino que incluso publicando contra reloj, todos sus vídeos tienen una calidad excelente tirando a cinematográfico y con su estilo muy carismático que desde luego marcó y sigue marcando tendencia entre otros muchos youtubers. Después de vez los vlogs de Casey, reconocerás su estilo inmediatamente en cuanto lo veas en vídeos de otra gente. También es muy aficionado a hacer vídeos de alguna temática concreta y éste que se ha montado va sobre su adoración por los drones, pero ésta vez ha utilizado uno enorme hecho específicamente para ello para hacer snowboard. La construcción del drone ha llevado casi un año y es un auténtico monstruo que merece la pena ver.
Leer más