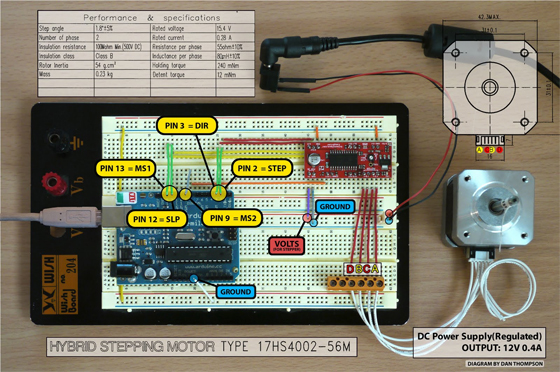
No os perdais este pequeño tutorial creado por Daniel Thompson desde Australia que nos muestra cómo controlar un pequeño motor paso a paso con Arduino utilizando el controlador EasyDriver. Dicha placa es una pequeña maravilla, ya que permite controlar un motor paso a paso con tan sólo dos pines (Dirección y PWM) y es muy fácil de montar. Esto quizás nos sirva para crear nuestra pequeña fresadora o el principio de un super robot que tome conciencia y domine el mundo!
Os dejo el esquema de conexiones y el código fuente a continuación...
Gracias José Luis por la noticia!
///////////////////////////////////////////////////////////
// Stepper Motor skecth for use with the EasyDriver v4.2 //
///////////////////////////////////////////////////////////
// Dan Thompson 2010
//
// Use this code at your own risk.
//
// For all the product details visit https://www.schmalzhaus.com/EasyDriver/
// For the full tutorial visit https://danthompsonsblog.blogspot.com/
////// ED_v4 Step Mode Chart //////
// //
// MS1 MS2 Resolution //
// L L Full step (2 phase) //
// H L Half step //
// L H Quarter step //
// H H Eighth step //
// //
////////////////////////////////////
int DIR = 3; // PIN 3 = DIR
int STEP = 2; // PIN 2 = STEP
int MS1 = 13; // PIN 13 = MS
int MS2 = 9; // PIN 9 = MS2
int SLEEP = 12; // PIN 12 = SLP
void setup() {
Serial.begin(9600); // open the serial connection at 9600bps
pinMode(DIR, OUTPUT); // set pin 3 to output
pinMode(STEP, OUTPUT); // set pin 2 to output
pinMode(MS1, OUTPUT); // set pin 13 to output
pinMode(MS2, OUTPUT); // set pin 9 to output
pinMode(SLEEP, OUTPUT); // set pin 12 to output
}
void loop()
{
int modeType = 1; // This number increases by multiple of 2 each through the while loop..
// ..to identify our step mode type.
while (modeType<=8){ // loops the following block of code 4 times before repeating .
digitalWrite(DIR, LOW); // Set the direction change LOW to HIGH to go in opposite direction
digitalWrite(MS1, MS1_MODE(modeType)); // Set state of MS1 based on the returned value from the MS1_MODE() switch statement.
digitalWrite(MS2, MS2_MODE(modeType)); // Set state of MS2 based on the returned value from the MS2_MODE() switch statement.
digitalWrite(SLEEP, HIGH); // Set the Sleep mode to AWAKE.
int i = 0; // Set the counter variable.
while(i<(modeType*200)) // Iterate for 200, then 400, then 800, then 1600 steps.
// Then reset to 200 and start again.
{
digitalWrite(STEP, LOW); // This LOW to HIGH change is what creates the..
digitalWrite(STEP, HIGH); // .."Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(1600/modeType); // This delay time determines the speed of the stepper motor.
// Delay shortens from 1600 to 800 to 400 to 200 then resets
i++;
}
modeType = modeType * 2; // Multiply the current modeType value by 2 and make the result the new value for modeType.
// This will make the modeType variable count 1,2,4,8 each time we pass though the while loop.
delay(500);
}
digitalWrite(SLEEP, LOW); // switch off the power to stepper
Serial.print("SLEEPING..");
delay(1000);
Serial.print("z");
delay(1000);
Serial.print("z");
delay(1000);
Serial.print("z");
delay(1000);
Serial.println("");
digitalWrite(SLEEP, HIGH);
Serial.println("AWAKE!!!"); // Switch on the power to stepper
delay(1000);
}
int MS1_MODE(int MS1_StepMode){ // A function that returns a High or Low state number for MS1 pin
switch(MS1_StepMode){ // Switch statement for changing the MS1 pin state
// Different input states allowed are 1,2,4 or 8
case 1:
MS1_StepMode = 0;
Serial.println("Step Mode is Full...");
break;
case 2:
MS1_StepMode = 1;
Serial.println("Step Mode is Half...");
break;
case 4:
MS1_StepMode = 0;
Serial.println("Step Mode is Quarter...");
break;
case 8:
MS1_StepMode = 1;
Serial.println("Step Mode is Eighth...");
break;
}
return MS1_StepMode;
}
int MS2_MODE(int MS2_StepMode){ // A function that returns a High or Low state number for MS2 pin
switch(MS2_StepMode){ // Switch statement for changing the MS2 pin state
// Different input states allowed are 1,2,4 or 8
case 1:
MS2_StepMode = 0;
break;
case 2:
MS2_StepMode = 0;
break;
case 4:
MS2_StepMode = 1;
break;
case 8:
MS2_StepMode = 1;
break;
}
return MS2_StepMode;
}
Material necesario



 Pinball casero hecho con Arduino
Pinball casero hecho con Arduino
 BoboBOT: un minirobot con orugas
BoboBOT: un minirobot con orugas
 Navidad Geek 2012: Villancicos por buzzer con Arduino
Navidad Geek 2012: Villancicos por buzzer con Arduino
 Matriz de LED gigante para mensaje scroll con Arduino
Matriz de LED gigante para mensaje scroll con Arduino
 Tutorial Arduino: Audio y reconocimiento de voz (Parte I SOMO 14D)
Tutorial Arduino: Audio y reconocimiento de voz (Parte I SOMO 14D)
 Monitorización casera de servidores con Arduino
Monitorización casera de servidores con Arduino

