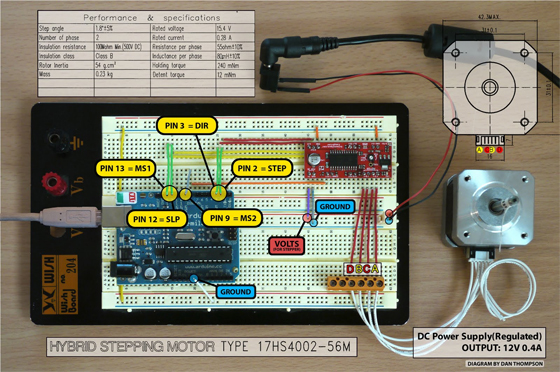
No os perdais este pequeño tutorial creado por Daniel Thompson desde Australia que nos muestra cómo controlar un pequeño motor paso a paso con Arduino utilizando el controlador EasyDriver. Dicha placa es una pequeña maravilla, ya que permite controlar un motor paso a paso con tan sólo dos pines (Dirección y PWM) y es muy fácil de montar. Esto quizás nos sirva para crear nuestra pequeña fresadora o el principio de un super robot que tome conciencia y domine el mundo!
Os dejo el esquema de conexiones y el código fuente a continuación...
Gracias José Luis por la noticia!
///////////////////////////////////////////////////////////
// Stepper Motor skecth for use with the EasyDriver v4.2 //
///////////////////////////////////////////////////////////
// Dan Thompson 2010
//
// Use this code at your own risk.
//
// For all the product details visit https://www.schmalzhaus.com/EasyDriver/
// For the full tutorial visit https://danthompsonsblog.blogspot.com/
////// ED_v4 Step Mode Chart //////
// //
// MS1 MS2 Resolution //
// L L Full step (2 phase) //
// H L Half step //
// L H Quarter step //
// H H Eighth step //
// //
////////////////////////////////////
int DIR = 3; // PIN 3 = DIR
int STEP = 2; // PIN 2 = STEP
int MS1 = 13; // PIN 13 = MS
int MS2 = 9; // PIN 9 = MS2
int SLEEP = 12; // PIN 12 = SLP
void setup() {
Serial.begin(9600); // open the serial connection at 9600bps
pinMode(DIR, OUTPUT); // set pin 3 to output
pinMode(STEP, OUTPUT); // set pin 2 to output
pinMode(MS1, OUTPUT); // set pin 13 to output
pinMode(MS2, OUTPUT); // set pin 9 to output
pinMode(SLEEP, OUTPUT); // set pin 12 to output
}
void loop()
{
int modeType = 1; // This number increases by multiple of 2 each through the while loop..
// ..to identify our step mode type.
while (modeType<=8){ // loops the following block of code 4 times before repeating .
digitalWrite(DIR, LOW); // Set the direction change LOW to HIGH to go in opposite direction
digitalWrite(MS1, MS1_MODE(modeType)); // Set state of MS1 based on the returned value from the MS1_MODE() switch statement.
digitalWrite(MS2, MS2_MODE(modeType)); // Set state of MS2 based on the returned value from the MS2_MODE() switch statement.
digitalWrite(SLEEP, HIGH); // Set the Sleep mode to AWAKE.
int i = 0; // Set the counter variable.
while(i<(modeType*200)) // Iterate for 200, then 400, then 800, then 1600 steps.
// Then reset to 200 and start again.
{
digitalWrite(STEP, LOW); // This LOW to HIGH change is what creates the..
digitalWrite(STEP, HIGH); // .."Rising Edge" so the easydriver knows to when to step.
delayMicroseconds(1600/modeType); // This delay time determines the speed of the stepper motor.
// Delay shortens from 1600 to 800 to 400 to 200 then resets
i++;
}
modeType = modeType * 2; // Multiply the current modeType value by 2 and make the result the new value for modeType.
// This will make the modeType variable count 1,2,4,8 each time we pass though the while loop.
delay(500);
}
digitalWrite(SLEEP, LOW); // switch off the power to stepper
Serial.print("SLEEPING..");
delay(1000);
Serial.print("z");
delay(1000);
Serial.print("z");
delay(1000);
Serial.print("z");
delay(1000);
Serial.println("");
digitalWrite(SLEEP, HIGH);
Serial.println("AWAKE!!!"); // Switch on the power to stepper
delay(1000);
}
int MS1_MODE(int MS1_StepMode){ // A function that returns a High or Low state number for MS1 pin
switch(MS1_StepMode){ // Switch statement for changing the MS1 pin state
// Different input states allowed are 1,2,4 or 8
case 1:
MS1_StepMode = 0;
Serial.println("Step Mode is Full...");
break;
case 2:
MS1_StepMode = 1;
Serial.println("Step Mode is Half...");
break;
case 4:
MS1_StepMode = 0;
Serial.println("Step Mode is Quarter...");
break;
case 8:
MS1_StepMode = 1;
Serial.println("Step Mode is Eighth...");
break;
}
return MS1_StepMode;
}
int MS2_MODE(int MS2_StepMode){ // A function that returns a High or Low state number for MS2 pin
switch(MS2_StepMode){ // Switch statement for changing the MS2 pin state
// Different input states allowed are 1,2,4 or 8
case 1:
MS2_StepMode = 0;
break;
case 2:
MS2_StepMode = 0;
break;
case 4:
MS2_StepMode = 1;
break;
case 8:
MS2_StepMode = 1;
break;
}
return MS2_StepMode;
}
Material necesario



 Ya está disponible el nuevo Arduino IDE 2.0 (beta) y pinta espectacular
Ya está disponible el nuevo Arduino IDE 2.0 (beta) y pinta espectacular
 Escáner termal con Arduino
Escáner termal con Arduino
 El ADK de Google en un Arduino UNO!
El ADK de Google en un Arduino UNO!
 Cómo emparejar dos módulos bluetooth HC-05
Cómo emparejar dos módulos bluetooth HC-05
 Descargar manual en PDF de Arduino en Español
Descargar manual en PDF de Arduino en Español
 Lo hemos probado y éstas son las novedades de Arduino IDE 2.0 (Estable)
Lo hemos probado y éstas son las novedades de Arduino IDE 2.0 (Estable)

