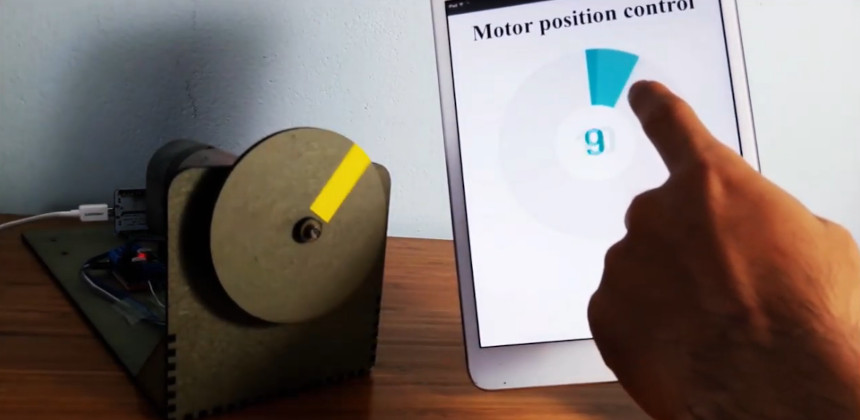
Si quieres posicionar un motor, tienes varias opciones como por ejemplo utilizar un servomotor o incluso un motor paso a paso. En el primer caso como el servomotor, es una opción barata pero tiene sus limitaciones como el ángulo máximo de rotación. Con los motores paso a paso puedes incluso girar continuamente y no tienes ese problema, pero es ya una solución más cara y que requiere de controladores específicos. Un buen sistema para eso es utilizar un motor DC de toda la vida, de esos que le meter corriente y gira. Si a ese motor le añades un encoder para conocer su posición y junto a buen control PID con Arduino, puedes hacer que se posicione de una forma muy fácil como se explica en el vídeo que te dejo a continuación.
Enlaces:
 Cómo hacer un globo POV RGB con Arduino
Cómo hacer un globo POV RGB con Arduino
 El increíble motor radial de 12 cilindros hecho con LEGO que funciona
El increíble motor radial de 12 cilindros hecho con LEGO que funciona
 Minestation, meteorología para Minecraft con Arduino
Minestation, meteorología para Minecraft con Arduino
 Contador de suscriptores de Youtube con ESP8266
Contador de suscriptores de Youtube con ESP8266
 Juego del laberinto controlado con Wii-Fit y Arduino
Juego del laberinto controlado con Wii-Fit y Arduino
 (Video) Arduino Nunchuck 3D Studio Max
(Video) Arduino Nunchuck 3D Studio Max