Publicado por Oscar Gonzalez
en Robótica
el 16/09/2015
Publicado por Oscar Gonzalez
en Robótica
el 16/09/2015
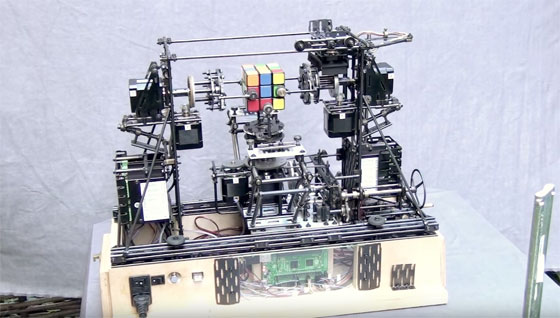
No es la primera vez publico alguna máquina que resuelve el cubo de Rubik, pero esta última me ha llamado la atención por el tremendo trabajo mecánico que tiene. Lo primero que llama la atención es que utiliza motores paso a paso, lo que hace que todos los movimientos sean suaves y muy precisos comparado con otros modelos que utilizan servomotores. Por otro lado y para realizar los calculos necesarios para resolver el cubo, han utilizado un módulo Compute de Raspberry Pi. Que básicamente es lo mismo que una Raspberry Pi, pero minimizada. El autor de este impresionante proyecto tiene bastante experiencia en sistémas mecánico y de hecho ha diseñado varias formas de agarrar el cubo de Rubik para moverlo de forma más rápida y eficiente. Os dejo un par de vídeos a continuación que no tienen desperdicio.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 25/08/2015
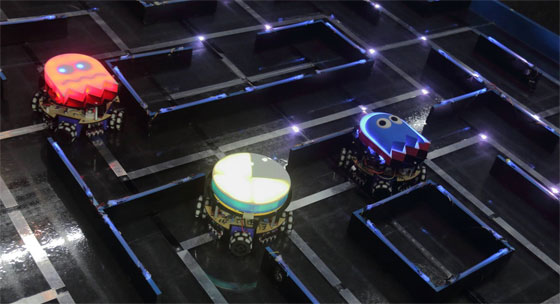
En la pasada Maker Faire Sydney de Australia se han presentado muchos prodyctos y Makers interesantes pero uno de ellos me ha llamado especialmente la atención. Ya sabéis que me gusta montar algun juego de vez en cuando para aprender cosas nuevas. Éste en concreto me ha parecido genial ya que es el clásico juego de Pacman pero montado con robots que se desplazan físicamente sobre un tablero de juego. Los robots tienen una ruedas omnidireccionales y están controlados por un Arduino. Mediante una conexión Wifi se envía la posición de cada robot (fantasma) así como el Pacman a un ordenador y una cámara web colocada sobre el tablero reconoce cada robot y aplica cierta inteligencia artificial para moverlos en el tablero. Dave de EEVblog ha hecho un estupendo reportaje del evento donde también habló con los creadores de este fantástico proyecto.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 06/08/2015
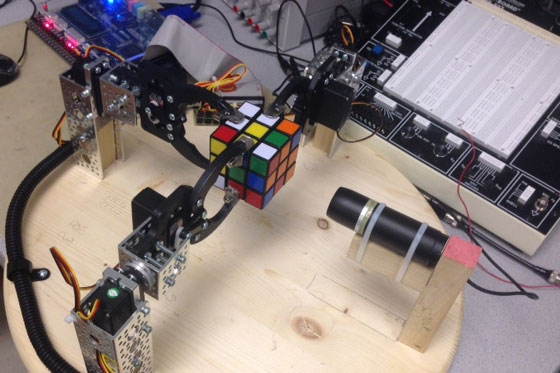
No es la primera vez que publico sobre el cubo de rubik y de hecho hay muchos proyectos de robots que resuelven el famoso cubo de mejor o peor manera. Este proyecto hace exactamente eso, resolver el cubo de bubik pero la diferencia es que utiliza un FPGA Nios II para la lógica. Con la ayuda de unas pinzas robóticas y una pequeña base de madera es capaz de agarrar y mover las piezas necesarias para resolverlo. No os perdais el vídeo a continuación así como el enlace a su web con todos los detalles.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 13/07/2015

El Equipo Pegasus ha creado un vehículo autónomo que utiliza algoritmos y técnicas de visión artificial así como los datos de varios sensores, con el fin de seguir los carriles de una carretera, realizar maniobras de aparcamiento y sortear obstáculos bloqueando su camino. Lo interesante de este proyecto es que en primer lugar utiliza un teléfono Android como la unidad que se encarga del procesamiento de imágenes y decisión. Es responsable de transmitir de forma inalámbrica instrucciones para un Arduino que controla los aspectos físicos del vehículo. En segundo lugar, los diversos componentes de hardware ( es decir, sensores , motores , etc.) están programáticamente gestionados de una manera orientada a objetos, una librería desarrollada para Arduino, que permite a los desarrolladores sin experiencia en los sistemas integrados de realizar muy facilmente sus tareas sin preocuparse por los detalles de implementación de bajo nivel. Todos los detalles del proyecto están en su web y también está disponible el código fuente en GitHub por si quieres echar un vistazo.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 11/07/2015
Lo hemos incorporado hace muy poquito y no he podido resistirme en hacer un pequeño vídeo mostrando todas las posibilidades de la nueva cámara Pixy. Es un proyecto que inicialmente ha sido presentado en Kickstarter y ha conseguido recaudar más de 270.000 dólares para ponerlo en producción. Lo mejor de todo es lo sencillo que es su configuración con tan solo pulsar un botón. Es totalmente actualizable y libera el procesador host principal de la dura tarea de analizar imágenes y por lo tanto permite añadir reconocimiento visual a proyectos basados en Arduino o similares. Ya está bien de presentaciones, así que os dejo un vídeo explicativo a continuación con todos los detalles!
Leer más