Publicado por Oscar Gonzalez
en Robótica
el 13/09/2023
Publicado por Oscar Gonzalez
en Robótica
el 13/09/2023
La placa Micro:bit es una excelente herramienta para aprender a programar montar proyectos sencillos, incluso para alguien que nunca ha tocado la programación. Existen multitud de ejemplos y está muy bien documentada, pero hay veces donde puedes querer ir un poco más lejos con tu placa Micro:bit.
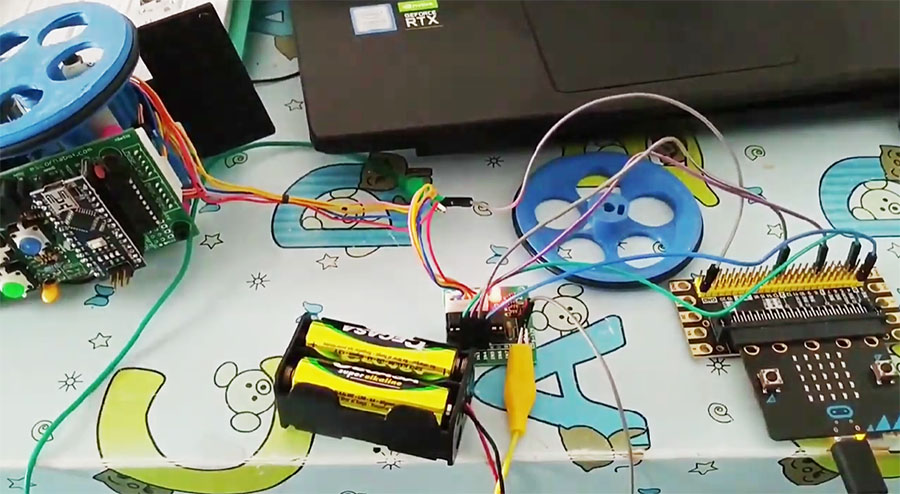
Hasta ahora, seguro que ya has conectado sin problema un motor normal, de esos que le aplicas corriente y gira. Pero hay motores mucho má sinteresantes como los motores paso a paso, especialmente uno que es muy barato y con el que puedes montar pequeños robots. Estoy hablando del motor paso a paso 28BYJ-48 que es un poco más complicado de hacer funcionar porque requiere de una secuencia de pulsos precisa en un orden concreto.
En el vídeo que puedes ver a continuación, podrás aprender a usar éste sencillo motor paso a paso usando tu placa Micro:bit y MakeCode. A partir de ahú ya podrás crear todo tipo de proyectos interesantes!
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 16/08/2023

Sabemos de sobra que imprimir en 3D éste tipo de robot no les sienta demasiado bien ya que las piezas generan holguras de todo tipo y reducen la precisión, pero los robots SCARA siguen siendo muy impresionantes de ver y divertidos de montar. En el vídeo que te dejo a continuación, podrás ver un modelo más que bajo mi opinión está realmente bien diseñado y que la grandísima mayoría de sus piezas están impresas en 3D. Además, los componentes que utiliza son muy similares a los de cualquier impresora 3D, como motores NEMA 17, poleas dentadas por ejemplo, así que si tienes algunas piezas de repuesto para tus máquinas en algún cajón, podrás plantearte montar éste brazo robot sin gastar demasiado. Como electrónica de control utiliza una CNC shield junto con una placa Arduino UNO que junto con un software propio que incluye cinemática inversa (Inverse Kinematics), podrás controlarlo muy fácilmente. Os dejo el vídeo y los enlaces a las piezas STL tras el salto.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 25/07/2023
James Bruton es un tío que acostumbra a montar todo tipo de robots épicos y si todavía no lo conoces, te recomiendo su canal de youtube donde encontrarás proyectos realmente impresionantes. Uno de sus últimos proyectos es un robot llamado OpenDog con cuatro patas y realmente enorme en cuanto a dimensiones. En ese robot, utiliza unos actuadores lineales de husillos bastante caros y en el vídeo que os dejo a continuación nos explica cómo hacer una réplica de los actuadores pero más pequeños y más económicos, controlados con Arduino.
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 19/07/2023
Los brazos robots tienen mucho encanto, pero no es un proyecto que puedas montar en un fin de semana después de la siesta, sino que es un proyecto de hecho bastante complejo.
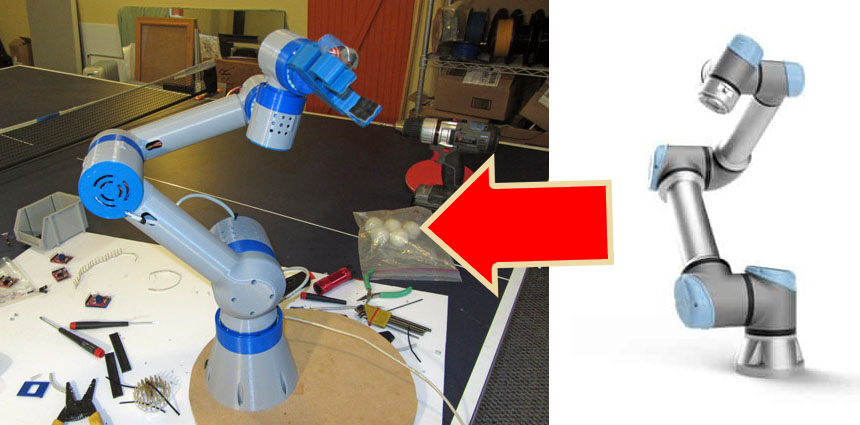
El brazo robot industrial UR8 es conocido por su forma extraña y sus seis ejes de movilidad, además de utilizar engranajes planetarios para minimizar el espacio ocupado y aprovechar a la máxima potencia de los motores.
Lo malo de esos engranajes es que son bastante caros, pero este modelo que te dejo hoy aquí es una réplica al 80% de su tamaño original, que también utiliza engranajes planetarios, pero impresos también en 3D.
Por razones obvias no son tan robustos como unos de metal, pero permite montar un brazo robot muy similar para ser el amo en cualquier fiesta de cumpleaños :)
Leer más
Publicado por Oscar Gonzalez
en Robótica
el 17/07/2023
Hace ya tiempo que vengo siguiendo este espectacular proyecto de cerca y creo que la espera ha valido la pena. Se trata de un brazo robot de 6 ejes impreso casi en su mayoría en 3D.
Pero no es la primera vez que vemos un brazo robot publicado aquí, de hecho he publicado bastantes, pero lo especial de este que por supuesto es Open Source es su excelente documentación, así como su tamaño muy compacto y basado en motores paso a paso que le dan una gran precisión.
Antes de que empieces a calentar tu impresora, no te pierdas el enlace a su Github donde podrás ver todos los documentos tanto STL como un genial manual de ensamblaje.
El código fuente también está disponible y está pensado para un Arduino MEGA implementando también cinemática inversa que no es poco. A continuación tienes cinco completos vídeos que explican desde absolutamente cero su diseño y montaje, incluso sobre cómo funcionan sus ejes a nivel matemático.
Leer más