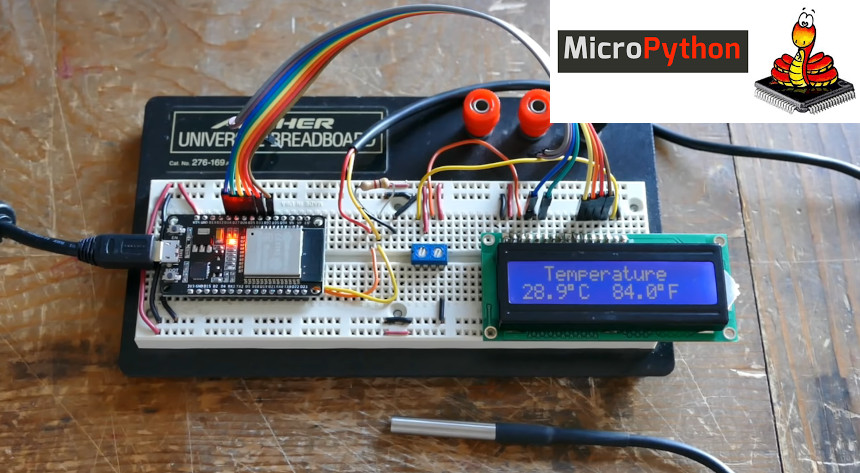
A éstas alturas tenemos bastante claro cómo programar una placa ESP32 ya que el entorno de Arduino nos permite hacerlo. Ya sabes que con el IDE de Arduino se programa en C/C++ y para el que nunca ha programado puede ser un lenguaje intimidante. Gracias a la gran potencia de los microcontroladores de tipo ESP32, podemos cambiar la forma de programarlos y utilizar MicroPython, que es más que una versión minimizada del lenguaje Python. El lenguaje de programación Python es mucho más permisivo y tiene una sintaxis más amigable, pero para poder utilizarlo con ESP32, debemos realizar unos pasos previos que se describen en el vídeo que te dejo a continuación.
Leer más
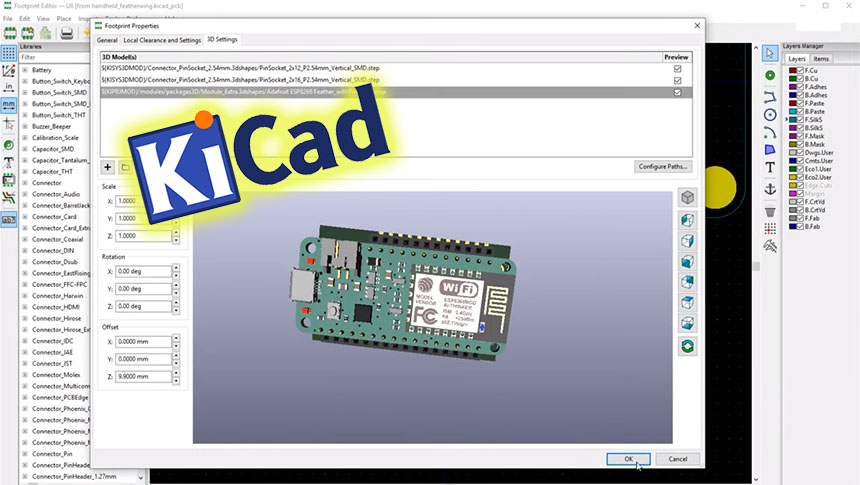
Llega un momento en la vida de un maker en el que es necesario por un motivo u otro diseñar una placa PCB. Para los que ya saben hacerlo, es un proceso relativamente sencillo, pero para aquel que nunca ha probar a diseñar una placa PCB, puede ser una auténtica odisea. Admitámoslo, los programa de CAD no son demasiado amigables, lo que pasa que con el tiempo te acostumbras a ellos. Para comenzar a diseñar tu primera placa PCB necesitas un programa y existen varios pero uno de los más populares y además totalmente libre y Open Source se llama KiCad. A continuación os dejo un vídeo directo donde se muestra cómo diseñar un placa PCB desde cero con KiCad. Si, son tres horas y media de vídeo pero si has venido a aprender, te gustará y te pasarán volando y sino, siempre te quedará volver a perder el tiempo viendo los vídeos de los gatitos en Youtube.
Leer más
 Publicado por Oscar Gonzalez
en DIY
el 14/08/2023
Publicado por Oscar Gonzalez
en DIY
el 14/08/2023
Los carteles luminosos molan mucho y la impresión 3D es una excelente herramientas para hacerlos de todo tipo. En el canal de Duke Doks podéis ver un excelente tutorial para crear carteles luminosos con LED impresos en 3D. Si todavía no conoces el canal de Duke Doks, no dudes en suscribirse por que canales con esa calidad tanto en su estética como en contenido hay muy pocos! En su guía paso a paso, explica cómo crear el cartel utilizando Fusion 360 y también muestra cómo hacer el ensamblaje final con la tira de LED. Además no utiliza ningún tipo de Arduino o nada programable, simplemente un controlador de tiras LED que no necesita programación lo que hace todo mucho más sencillo de montar. Estoy seguro que tras ver éste vídeo, lloverán carteles de colores por todos los lados, y no es para menos!
Leer más
El IDE de Arduino permite programar no solo las placas oficiales Arduino sino también una casi infinidad de placas interesantes como ESP8266, ESP32, los Feather de Adafruit y otros.
Pero desde el punto de vista de la comodidad a la hora de programar, se puede decir que no es la mejor opción. Por ejemplo, los que venimos de otros lenguajes y entornos de programación, hay cosas que se echan de menos, como el autocompletado, un árbol de ficheros del proyecto, una buena gestión de dependencias y librerías, etc.
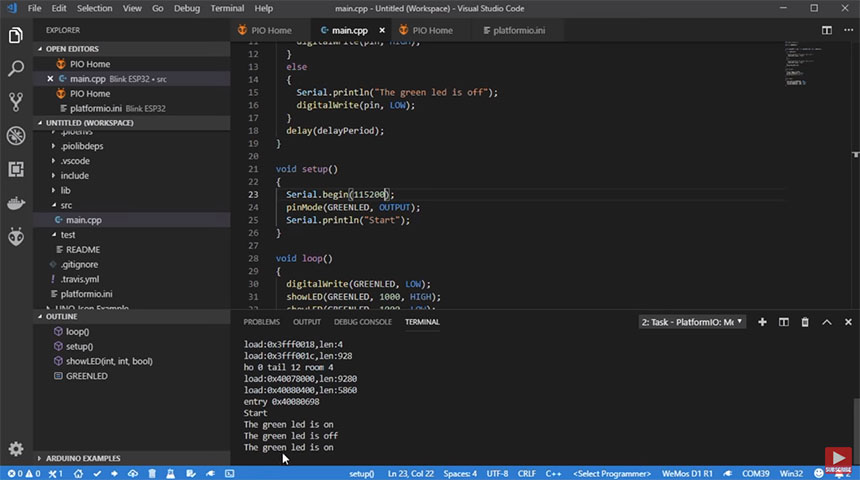
Una forma de tener todo eso y algo más es utilizar PlatformIO junto a Visual Studio Code de Microsoft. No solo es un tema de "pijería", que para gustos están los colores, sino que sobre todo en proyectos grandes con muchos ficheros, si no tienes un sistema de programación potente y ordenado, puede ser un auténtico caos.
En el vídeo que te dejo a continuación, Andreas Spiess, más conocido como El tío del acento suizo, nos hace una épica explicación desde cero sobre cómo poner PlatformIO a funcionar para compilar y cargar tanto programas para placas Arduino como para ESP8266 y ESP32.
Además, indica un truco muy chulo para que las librerías de tu proyecto no estén a nivel del IDE, sino en el mismo proyecto. De esa manera, cuando distribuyas el código, las librerías irán con él y todo el mundo se ahorrará unos cuantos dolores de cabeza.
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 09/07/2023
Te pongo en situación: Acabas de montar tu proyecto IoT Wifi con ESP8266 y lo has puesto en un sitio donde no es fácil acceder a él como un falso techo o incluso en el exterior de tu casa. De repente te encuentra que hay un bug (un fallo) en un código y necesitas reprogramarlo. Ahí es cuando te das cuenta de que no es viable ir a conectar un cable USB con un portátil o incluso no quieres desmontar todo.
Para resolver esta incómoda situación, existe un método llamado OTA o programación Over The Air que permite programar tu ESP8266 mediante Wifi sin cables. Una vez lo pruebes, te preguntarás que has hecho con tu vida hasta ahora.
Leer más