No os perdais el espectacular proyecto que nos envía Jesus Ayuso, que con elementos comprados en su mayoría en bricogeek.com, ha ido construyendo robots caseros autónomos. Aprovechando las capacidades de los teléfonos actuales, su robot puede usar la visión para evitar obstáculos, conversar, y obedecer órdenes como seguir objetos de un color. Está basado en una tarjeta IOIO. En su última evolución ha incorporado el kit pan/tilt.
A continuación os dejo la presentación completa de su proyecto, altisimamente recomendado. Gracias Jesus por enviar tu proyecto!
Robotcontrolado por teléfono Android
El objetivo del proyecto era desarrollar un pequeño robot controlado por un teléfono Android como base para probar tecnología de visión e IA. No debería ser solo un juguete controlado como un mando a distancia, sino que debería ser autónomo, pudiendo circular, recibir órdenes habladas y responder hablando, como debería hacer un robot. Para este objetivo, pensé en reutilizar el software que existe disponible en la red de manera gratuita, y sobre este desarrollar las funcionalidades deseadas.
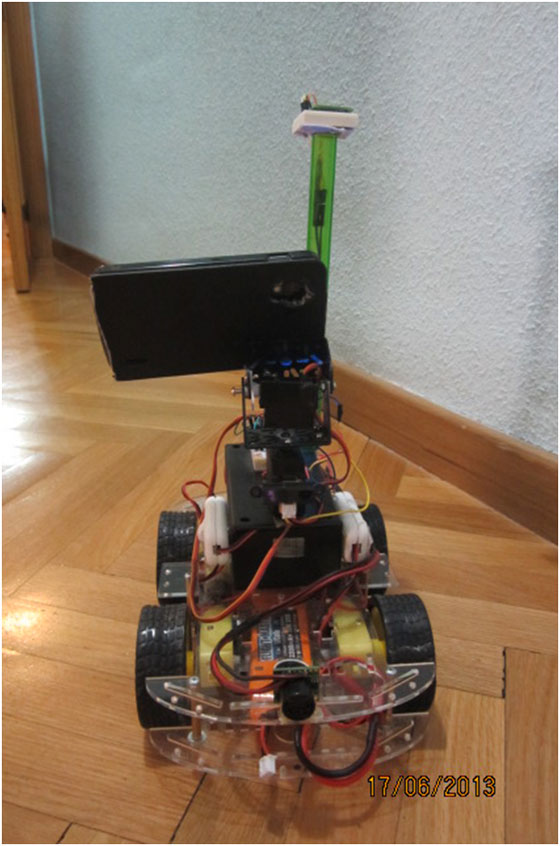
Los móviles actuales aportan cualidades únicas para hacer de pequeños controladores de robot. Son ligeros, integran multitud de sensores incluyendo la cámara, tienen una enorme potencia de cálculo y conectividad. En concreto en este proyecto he utilizado un teléfono AndroidNexus 4 como cerebro del robot.
El hardware por supuesto podría ser desarrollado más profesionalmente y ser comercializado después para tener robots autónomos por la casa. Estos robots podrían usarse para jugar, para vigilar o transportar cosas, con solo acoplar un teléfono de los que tengamos al hardware,
Voy a resumiros el trabajo realizado hasta ahora. Si alguien está interesado, quiere colaborar o incluso piensa que podemos comercializar un hardware basado en estos desarrollos, puede contactar conmigo.
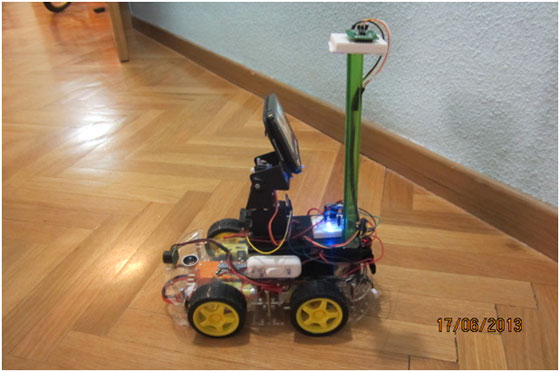
El Hardware
Estos son los componentes actuales:
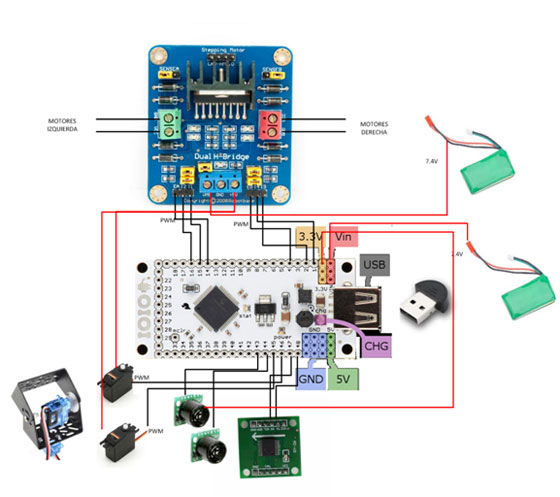
Tarjeta IOIO. Es el elemento a través del cual el teléfono se comunicaría con los motores y los sensores. La tarjeta IOIO se puede conectar con el teléfono por medio de un conector USB o por medio de una bluetooth añadiendo a la tarjeta un “dongle”. Este es el método de conexión usado actualmente.
Control de motores a cargo del controlador de doble puente H - L298. Por medio de la señal PWM se regula la corriente que llega alos motores del chasis y también se utiliza su salida +5V para alimentar a los servos analógicos de la “cabeza”.
Dos sensores ultrasónicos para evitar obstáculos no detectados por el sistema de visióny para dar marcha atrás. Últimamente he integrado un sensor de infrarrojos de distancia que da mejor resultados que los ultrasónicos.
Un kit pan/tilt para dar movilidad a la “cabeza” del robot. Dos servos analógicos controlan el kit.
Un chip brújulaGY-26-USART para conocer la orientación. Se podría haber utilizado la brújula del teléfono pero está sujeta a magnetizarse por la presencia de elementos metálicos cercanos. Esta brújula está montada actualmente en una torre para aislarse lo más posible de elementos con hierro del propio robot y del suelo de la casa, como vigas.
La alimentación es con dos baterías lipo de 7.4V, una para la tarjeta IOIO y otra para el L298.
Esquema
El software
Para un robot autónomo que pretenda poder hacer diversas tareas, el software es la parte que se llevará más horas de trabajo. Para incorporar capacidades al robot he partido de un enfoque “de abajo a arriba”, donde las funcionalidades de bajo nivel dan pie a la incorporación de funcionalidades de mayor nivel. Todas las pruebas son en un entorno normal de una casa, no en zonas o secciones preparadas o pintadas especialmente para el robot.
Software base "Open Source" incorporado:
OpenCV.: Para proceso de imágenes. Existen versiones para Andorid e iOs. Es una de las liberías de proceso de imágenes más importantes que existen
Chatter.: Es un “bot de conversación” similar al que se puede encontrar en algunos asistentes que parecen conversar con nosotros, pero modificado para que pueda reconocer órdenes y enviarlas al planificador de acciones.
Y los módulos principales que incorpora actualmente, desarrollados por mí:
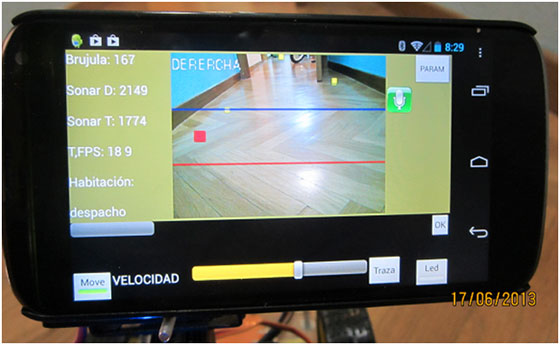
Cámara.: Capacidad básica de ver obstáculos. Para distinguir los obstáculos del suelo se calculan los bordes alrededor de los objetos y se determina la zona más libre de obstáculos.
Proceso de imagen. Algunas de las capacidades actuales son:
- Localizar un color predeterminado o uno elegido de lo que se está viendo.
- Reconocer la habitación donde está ahora por comparación con fotografías almacenadas
- Reconocer una persona (con la ayuda de las librerías OpenCV.)
Movimientos básicos: Adelante, atrás, girar, girar sobre si mismo hacia un ángulo…
Patrones de movimiento: Son capacidades básicas de movimiento de más nivel que el simple movimiento, y construidas sobre los movimientos básicos.Algunos ejemplos de patrones ya implementados:
- Deambular sorteando obstáculos
- Avanzar evitando obstáculos en una dirección de la brújula
- Buscar un sitio libre al que moverse después de encontrar un obstáculo que no se ha podido evitar
- Seguir un color determinado
- Seguir el color que esté viendo
Planes futuros
Usando los patrones de movimientos básicos, se puede planear el recorrido para ir de una habitación a otra. Para eso es necesario que se defina al robot una forma de ir de un sitio a otro para que pueda hacer planes. Esto se consigue con un fichero XML en el que se especifica como ir de cada habitación a las habitaciones contiguas. Con estos datos, el planificador puede el plan completo para ir de una habitación a cualquier otra.
Por ejemplo, el siguiente trozo de XML le dice que para pasar de la entrada al comedor debe encontrar una señal de color verde. Cuando esté cerca de ella, debe orientarse a 90º y mover se en esa dirección 6 segundos.
Posicionamiento
Para que el robot pueda planear como ir de un sitio a otro lo primero que tiene que saber es donde está. Este es uno de los mayores problemas los que se enfrenta un robot en un espacio cerrado, y se han estudiado muy diversas soluciones hasta ahora.
Actualmente el sistema para determinar en que habitación en la comparación de lo que la cámara ve con una serie de imágenes almacenadas, clasificadas por habitación. La comparación se hace en base al histograma de distintas secciones de las imágenes. Pero como plataforma de pruebas que es, se seguirán probando nuevos sistemas de localización.
Conclusión
Con este proyecto tenemos un sistema de bajo coste con gran capacidad de procesamiento en el que experimentar y desarrollar los elementos que un robot autónomo tendrá que tener para vivir en nuestros hogares, desde la capacidad básica de ir y venir, reconocer su entorno, comunicarse y jugar o hacer alguna que otra función útil, como transporte y limpieza. La adaptación de algoritmos como SLAM, e inclusos el paso al sistema operativo para robot ROS son otras de las posibilidades para mejorar la plataforma.

En la tienda







 Cubetto: Aprender a programar un robot para niños
Cubetto: Aprender a programar un robot para niños
 Novedades del brazo robot impreso en 3D de Andreas
Novedades del brazo robot impreso en 3D de Andreas
 Ejemplo de programa para Android con Processing
Ejemplo de programa para Android con Processing
 (Video) Robot controlado con Wii Nunchuck y Arduino
(Video) Robot controlado con Wii Nunchuck y Arduino
 (Video) Robot sigue pelotas con camara CMUCam2
(Video) Robot sigue pelotas con camara CMUCam2
 Cómo conectar Android con Arduino por Bluetooth
Cómo conectar Android con Arduino por Bluetooth





