
Tras la resaca de la XGN14 el pasado fin de semana, os dejo por aquí un pequeño resumen con fotos y vídeos del taller de introducción a la robótica con Arduino que hemos organizado. Fué un taller muy entretenido donde los participantes montaron desde cero un pequeño robot llamado XGNbot, el cual es básicamente un pequeño robot que evita obstáculos gracias a 3 sensores de distancia por infrarrojos, totalmente controlado con Arduino. La principal característica del robot era que su chasis ha sido impresora con una SBOT, una nueva impresora 3D desarrollada en Galicia por StaticBoards, que amablemente nos ha impreso todos los chasis. También hemos visto en funcionamiento su impresora y ha sido impresionante su facilidad de uso!
Queremos dar las gracias a todos los participantes que por supuesto se pondrán a mejorar el diseño inicial para crear un robot más potente. Quedamos a la espera de las fotos! :)
No os perdais los detalles a continuación...
XGNbot
Aquí teneis el robot de uno de los participantes en funcionamiento, con el "stress test" ;)
Un feliz particpante con su flamante robot! :)

Los planos se han desarrollado en Solid Works para luego poder ser impresos por la impresora SBOT. Se han impresora también unos pequeños acoples para los motores y el conjunto quedó bastante compacto:
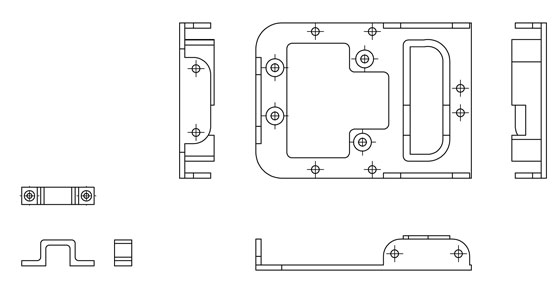
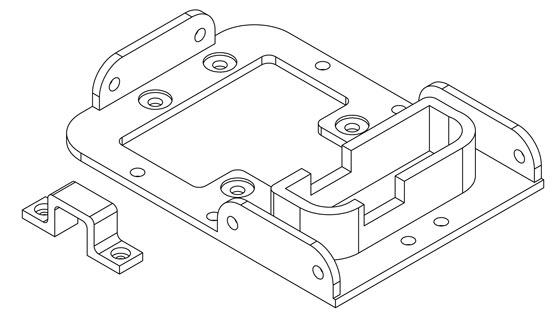
Si quieres descargar los archivos STL de Solid Works para imprimirlo en tu impresora 3D, puedes hacerlo aquí.
La impresora 3D SBOT en funcionamiento
Fotos del taller de robótica y la XGN14
Para los que querais hechar un ojo al código fuente del robot, podeis descargarlo aquí. El código es muy sencillo y podeis utilizarlo como base para otro robot de similares características.
Esperamos que os gustara el taller y no dudaremos en montar otro en un futuro muy próximo!
Componentes utilizados para el XGNbot







 TPV Físico para tarjeta de crédito con Arduino
TPV Físico para tarjeta de crédito con Arduino
 Tienda: Super NES, Matriz RGB y Arduino Shield
Tienda: Super NES, Matriz RGB y Arduino Shield
 Cómo hacer el despertador LED definitivo con Arduino (requiere puntería!)
Cómo hacer el despertador LED definitivo con Arduino (requiere puntería!)
 Pistola lanza discos con Arduino
Pistola lanza discos con Arduino
 Cómo construir una CNC sencilla y barata con Arduino
Cómo construir una CNC sencilla y barata con Arduino
 Clasificador automático de M&M's con Arduino
Clasificador automático de M&M's con Arduino