Publicado por Oscar Gonzalez
en Arduino
el 10/11/2023
Publicado por Oscar Gonzalez
en Arduino
el 10/11/2023
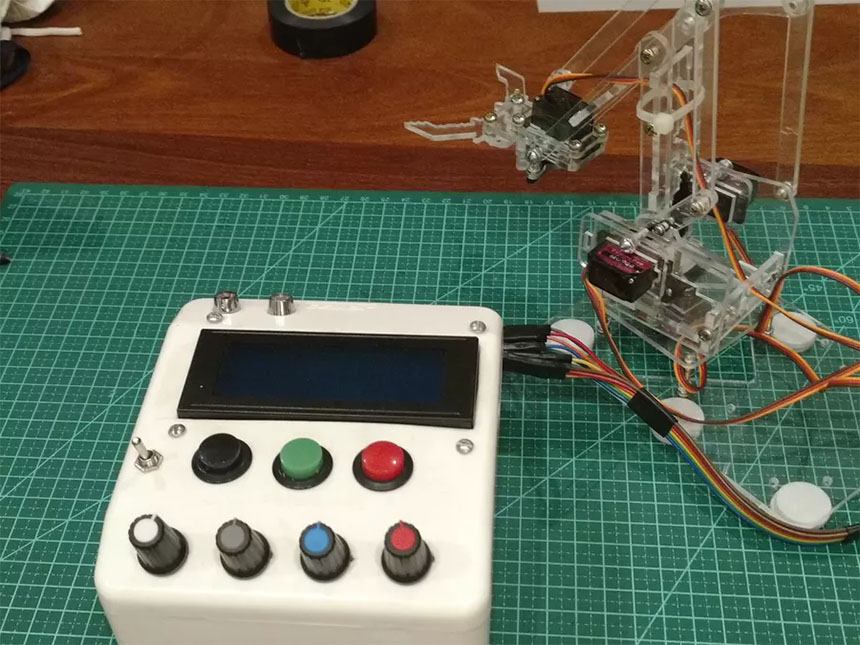
A todos nos gustan los brazos robots complejos, con muchos ejes, impresos en 3D y con cinemática inversa, pero hay que decir que son proyectos complejos y no todo el mundo puede o está dispuesto en meterse a fondo con ello. Para eso, hay opciones mucho más simples y fáciles de montar para simplemente practicar, pasar un rato entretenido y que sea asequible. Sobre todo si quieres aprender más sobre robótica o enseñar a los más pequeños. En el enlace que os dejo a continuación podrás ver el detalle del montaje de un pequeño brazo robot que funciona con servomotores, una forma muy barata de obtener movimiento en robots. Además el control se realiza mediante Arduino mediante unos potenciometros para posicionar los ejes. En pocas horas lo puedes tener funcionando y pasar un rato entretenido al mismo tiempo que aprendes más sobre robótica.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 16/06/2022
No es la primera vez que hablo sobre robots que resuelven el cubo de Rubik y los hay de todo tipo, incluso uno que se resuelve solo. La gran mayoría tienen un sistema mecánico complejo para poder girar el cubo y resolverlo pero éste que te dejo aquí es realmente sorprendente por lo simple que es.
La mayor parte del robot está impreso en 3D y utiliza una cámara conectada a una Raspberry pi. Lo que más me ha llamado la atención es el sistema que utiliza para mover el cubo y que consiste en dos servomotores. La caja está diseñada de tal manera que se sitúa en ángulo para poder aprovechar la fuerza de la gravedad y simplificar en gran medida el sistema.
No te pierdas el vídeo a continuación, que no tiene desperdicio.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 22/02/2022
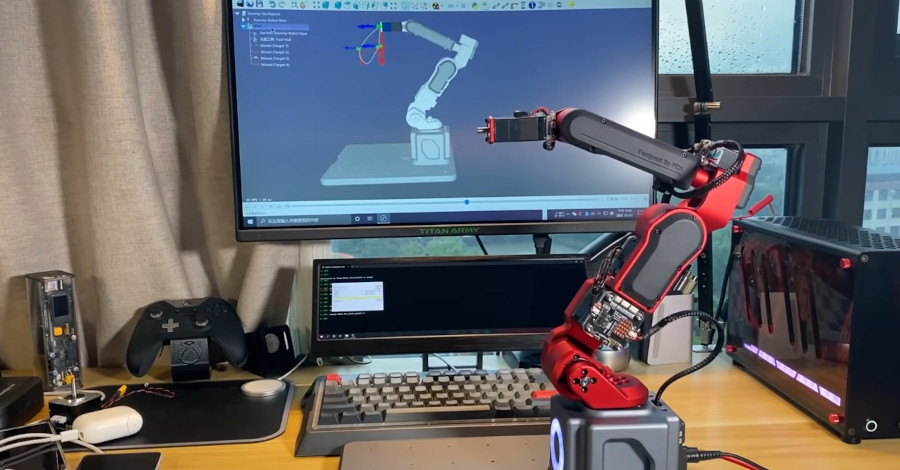
Cuando dices que alguien te lleva años de ventaja es por que probablemente sabe más que tu, eso es normal y no es malo. Luego está Zhihui Jun, que está a años luz en cuanto a conocimiento y pericia con su nueva creación. Es un pequeño brazo robot con cuerpo de aluminio y que utiliza motores paso a paso para el movimiento. Pero no solo eso ya que el autor ha desarrollado controladores propios de bucle cerrado, software y hasta ha creado varias puntas para diferentes aplicaciones.
El robot tiene una precisión más que decente y además, es totalmente de código abierto y lo tiene disponible en su repositorio de Github que te dejo enlazado, junto al obligatorio vídeo, a continuación.
Leer más
Publicado por Oscar Gonzalez
en Arduino
el 04/01/2022
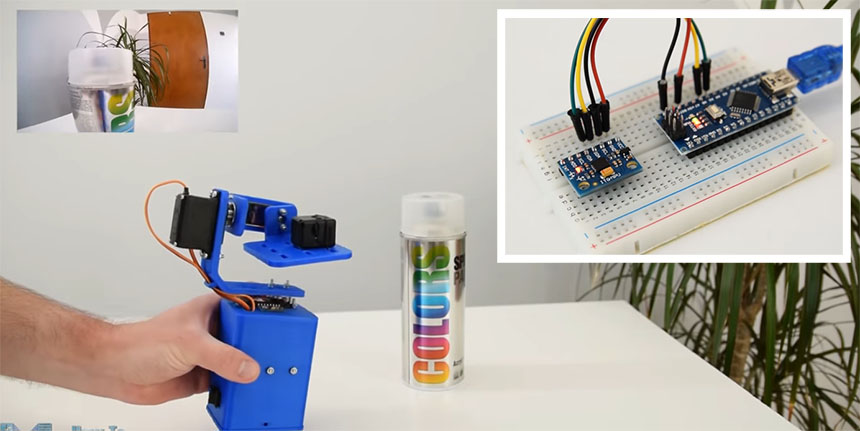
Un Gimbal o cabeza caliente sirve principalmente para estabilizar y permite por ejemplo tomar videos muy estables sin demasiados temblores. Son muy populares y existen gran variedad de modelos en el mercado. Pero por supuesto, si estas aquí, te interesa más aprender a montar tu propio gimbal casero y eso eso precisamente lo que te enseña el vídeo que te dejo a continuación.
La base del proyecto utiliza una placa Arduino junto con un IMU MP6050. Todo lo demás son unos servos y unas piezas impresas en 3D.
Leer más
ZeroBug es un robot creado por Max Kern que utiliza 18 servos para crear éste fantástico hexápodo. En cuanto a la electrónica de control utiliza varias cosas. Por un lado un STM32 se encarga del control puro de los servos así como de la cinemática inversa. Luego, una Raspberry Pi Zero se encarga de la parte de control generando una interfaz web con los mandos. También puede controlador mediante un mando inalámbrico Bluetooth. La placa de control STM32 se comunica con la Raspberry Pi mediante el puerto serie.
Todo el cuerpo está impreso en 3D y tiene un tamaño bastante compacto. Además, utiliza servos muy baratos, en concreto el modelo ES08A para el coste total del robot sea muy ajustado. Dispone de una completa página en Github con todos los detalles para construcción, así como una entrada en hackaday.io.
Leer más