Publicado por Oscar Gonzalez
en DIY
el 18/07/2018
Publicado por Oscar Gonzalez
en DIY
el 18/07/2018
El Dron DJI Mavic es probablemente uno de los quadcopters más populares actualmente debido a que puede transportarse fácilmente ya que las patas de los motores se puede doblar, quedando todo en un tamaño muy ajustado. Si te gusta vivir al límite y quieres tener un proyecto interesante para realizar éste verano, te dejo un vídeo a continuación que muestra cómo construir un DJI Mavic casero impreso en 3D. Añadiendo la electrónica necesaria, batería y motores, tendrás un quadcopter total funcional y molón para vacilar con los amiguetes.
Leer más
Publicado por Oscar Gonzalez
en RobĂłtica
el 05/11/2013
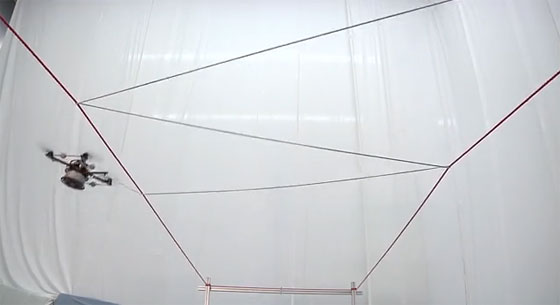
Si te han gustado las maniobras imposibles o si te gusta jugar al ping pong con un quadcopter, te gustará este vídeo donde una vez más, los chicos del ETH Zurich han desarrollado esta prueba donde un quadcopter es capaz de literalmente tejer una estructura de forma automática entre dos puntos. Yo creo que lo siguiente que les queda es enseñarles a calcetar... punto de cruz o algo parecido. Por qué no? :)
No os perdais el vídeo...
Leer más
Publicado por Oscar Gonzalez
en DIY
el 03/12/2012
Hemos publicado por aquí un montón de quadcopters de todo tipo incluso alguno con forma de Formula 1, pero hoy hemos llegado a uno que era de esperar que saliera a la luz tarde o temprano: PiCopter es un quadcopter basado en Raspberry Pi y no en un microcontrolador como venía siendo habitual.
La mayor diferencia reside en que al no ustiliza un sistema operativo en tiempo real (RTOS) es teoricamente más difícil poder ejecutar tareas de ejecución crítica como en el caso de los quadcopter, sin embargo su autor Matthew ha conseguido que vuele bastante bien y en su web explica en todo detalle el proceso de construcción. De hecho, a raiz de este post, he descubierto una imagen para Raspberry Pi con un esqueleto minimalista valido para este tipo de proyectos llamado Piratos que esta disponible en Github.
No os perdais un par de imágenes y el obligatorio vídeo a continuación...
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 06/09/2012
Hemos comentado por aquí repetidas veces las impresionantes formaciones con quadcopters y alguna maniobra imposible entre otras, sin embargo aquellos ejemplos de control con estos mosquitos voladores aunque son impresionantes de ver, son bastante técnicos de cara a alguien no iniciado en la materia. Cuando se junta el arte y la electrónica, aparecen otro tipo de formas de ver a estos estupendo aparatos tal y como se puede ver en el vídeo que os dejo a continuación, de una formación nocturna de 49 quadcopters que realizan todo tipo de figuras en el cielo. Lamentablemente no hay más detalles acerca de cómo se ha realizado o qué sistemas han utilizado (probablemente GPS) pero el espectáculo es digno de ver.
No os perdais el vídeo a continuación...
Leer más
Publicado por Oscar Gonzalez
en Modelismo
el 12/07/2012
El amigo José Julio nos envía el resultado de una modificación que hizo a uno de sus quadcopters, el cual ha modificado para darle la apariencia de un coche de Formula 1, en concreto el de Ferrari. El resultado es un proyecto francamente divertido, sin duda una mejora que Ferrari debería introducir en sus monoplazas ;-)
No os perdais el espectacular vídeo a continuación... Gracias José!
Leer más