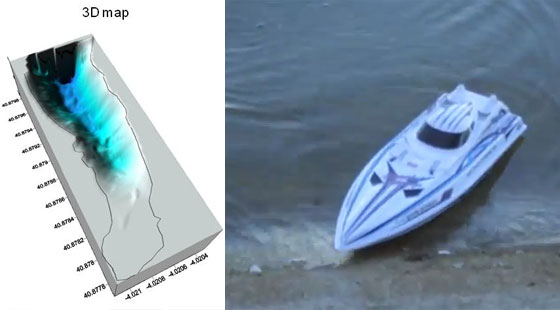
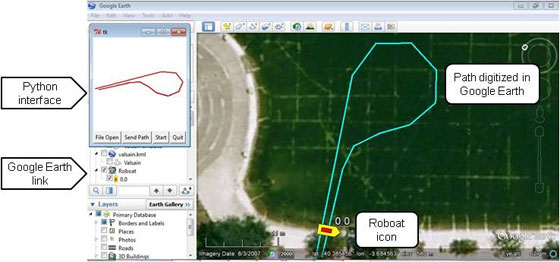
Riccardo Rocca nos envía desde Madrid su último proyecto llamado Roboat 2011. Es un barco robot capaz de seguir una ruta utilizando Arduino, un GPS y una brújula electrónica. La ruta se puede configurar desde un mapa en Google Earth y transferir a la memoria interna de Arduino. Durante la navegación, Roboat envía a un portátil las informaciones de su ubicación y orientación y estas son actualizadas sobre el mapa de Google Earth en tiempo real. Roboat recoge y envía también mediciones de la profundidad del agua que al final se pueden utilizar para generar un mapa batimétrico.
No os perdais el enlace a su web, esquemas y vídeo a continuación... Gracias por enviar tu proyecto Riccardo!
Enlace: Roboat 2011
Video
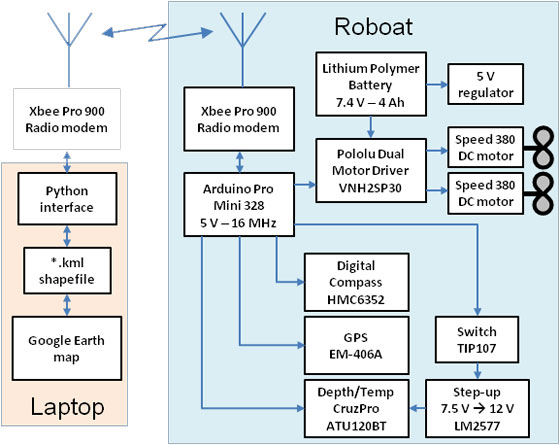
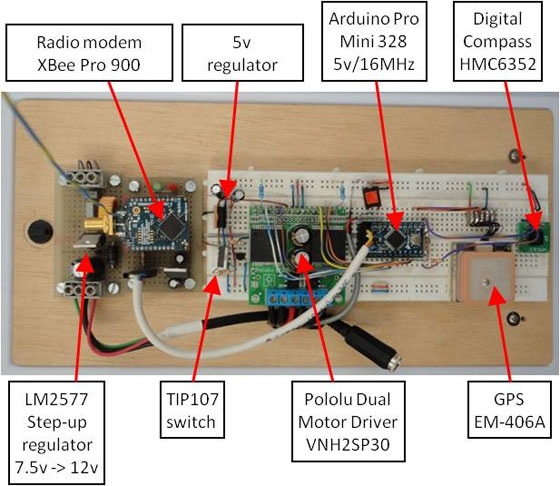
Los principales dispositivos utilizados son:
- Arduino Pro Mini 328 5v/16MHz
- GPS EM-406°
- Digital Compass HMC6352
- Radio modem XBee Pro 900
- Pololu Dual Motor Driver VNH2SP30
- Depth/Temperature transducer CruzPro ATU120BT



 (Video) Geolocalización GPS para la PSP
(Video) Geolocalización GPS para la PSP
 Mi Submarino, en Español y Libre
Mi Submarino, en Español y Libre
 (Video) Arducopter: Estabilizador para helicoptero RC
(Video) Arducopter: Estabilizador para helicoptero RC
 MegaHex: Hexacopter RC con video de alta definición
MegaHex: Hexacopter RC con video de alta definición
 Arduino GPS logger shield KIT
Arduino GPS logger shield KIT
