El Machine Learning o Deep Learning está últimamente On Fire ya que va habiendo mucha documentación para comenzar a hacer cosas interesantes, también hay algún curso de visión artificial para OpenCV muy interesante para comenzar a hacer cosas chulas. Casi todas las veces al utilizar Machine Learning, nos basados en entrenar una red de neuronas en base a datos previamente clasificados. Es decir, si queremos reconocer coches, primero debemos entrenar la red mostrandole imágenes de lo que sabes que son coches. Tras el entrenamiento, el resultado sabrá si es un coche o no al presentarle una nueva imagen desconocida, basándose en lo que ya ha aprendido. Conseguir un dataset es lo complicado, pero el en vídeo que os dejo a continuación os dejo un tutorial sobre cómo utilizar a Google para que nos dé datos ya clasificados y así tener datos para entrenamiento.
Leer más
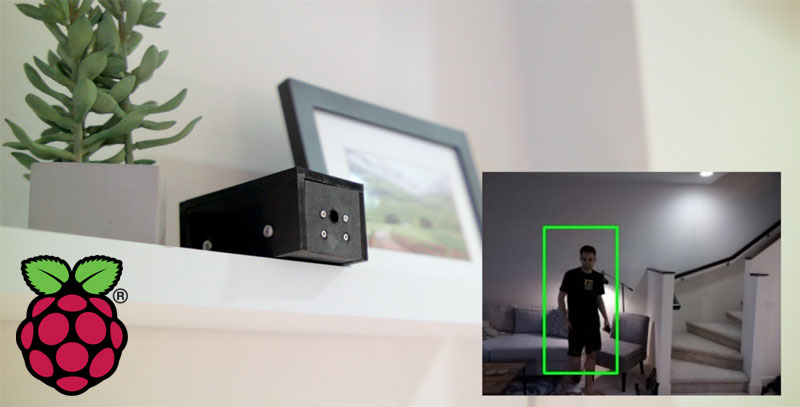
En el vídeo que os dejo a continuación, una Raspberry Pi Zero W se convierte en una cámara de seguridad inteligente. El sistema utiliza OpenCV para reconocer personas para enviar un correo electrónico al detectar un intruso. También tiene una interfaz web para que se pueda ver vídeo en tiempo real de la cámara cuando estás ausente.
Leer más
Automatizar cualquier cosa es el mejor reto para cualquier Maker y si además lo haces automático y/o autónomo pues mejor. La base de éste proyecto es una Raspberry Pi con una cámara web que utilizar el sistema de análisis de imágen OpenCV para reconocer personas. El resultado se utilizar para mover automáticamente una pistola de Airfost, pero puede aplicarse a todo tipo de situaciones donde necesites saber si alguien anda merodeando por delante.
Leer más
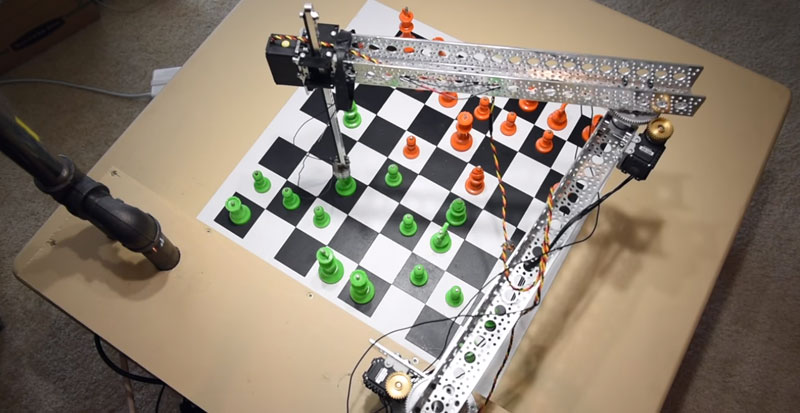
Programas que juegan al Ajedrez hay ya unos cuántos. Robots hay unos pocos también pero lo que ya no es tan común es cómo se lo ha montado el autor de éste proyecto que utiliza una combinación de la librería Open Source Sotckfish para resolver las jugadas, al mismo tiempo que utiliza un completo sistema basado en Machine Learning y visión artificial. Todo el conjunto lo gestiona una Raspberry Pi que corre una séries de scripts en Python para capturar y analizar las imágenes del tablero capturadas por la cámara. Me parece muy interesante el sistema ya que utiliza un modelo matemático para reconocer las diferentes piezas y colores basándose en un dataset (un conjunto de datos) para entrenar la máquina. Se generan unos datos estadísticos de cada imagen capturada y luego se prueba el porcentaje de acierto. En su web se pueden ver todos los detalles de forma muy detallada y todo el código e instrucciones está disponibles. ¡Altísimamente recomendado!
Leer más
 Publicado por Oscar Gonzalez
en RobĂłtica
el 22/04/2017
Publicado por Oscar Gonzalez
en RobĂłtica
el 22/04/2017

Hace pocos días hablaba por aquí del brazo robot llamado Walter que hizo Jochen Alt y hoy os dejo otro de sus impresionantes proyectos que me parece realmente espectacular. Se llama Luci y es la famosa lámpara de Pixar pero que funciona de verdad. A nivel mecánico utiliza potentes servomotores ayudados por muelles pero lo grueso del asunto está en el uso de una placa Linux ODROID que permite realizar cálculos de cinemática inversa. De esta forma puede realizar movimientos muy orgánicos y suaves mientras... ¡detecta la cara de quien se le pone delante! Efectivamente, tiene una pequeña cámara web que mediante OpenCV reconoce la cara y la sigue. Además Jochen ha añadido algo de personalidad a la lámpara con algunos movimientos simpáticos. El código fuente está en github (la explicación e implementación de toda la cinemática y curvas de Bezier es exquisita) y podéis ver los detalles del proyecto en su web, pero también os dejo un vídeo a continuación para que se os suba el SAV hasta la estratosfera ;) ¿Quién se anima a montarlo?
Leer más