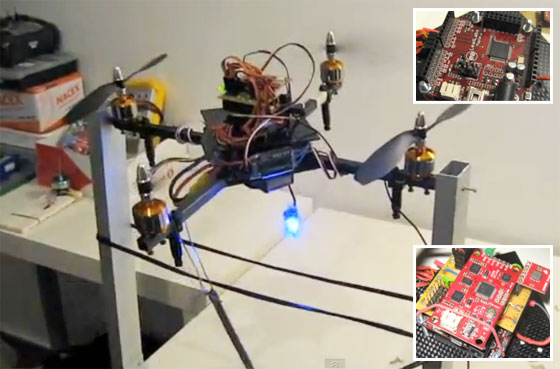
Xoan Carlos nos envía un vídeo de las primeras pruebas de equilibrio de un quadricoptero hecho con la placa Maple y el sistema de medición inercial 9DOF Razor IMU-AHRS. También incluye un sensor de presión barométrica BMP085 que servirá más adelante para el control de altitud. Hemos visto por aquí una infinidad de quadcopter con Arduino y la verdad es que me llama la atención que Xoan utiliza un a placa Maple dado que es bastante más potente que un Arduino. Seguiremos de cerca este proyecto del que seguro tendremos más noticias en breve. Enhorabuena xoan, excelente trabajo!
No os perdais el vídeo a continuación...
 Programa de ejemplo de control PID en VB6
Programa de ejemplo de control PID en VB6
 Máquina automática casera para lanzar caramelos con reconocimiento de caras y controlada con Raspberry Pi y Amazon Alexa
Máquina automática casera para lanzar caramelos con reconocimiento de caras y controlada con Raspberry Pi y Amazon Alexa
 Un robot balanceador con Raspberry Pi Pico y motores paso a paso
Un robot balanceador con Raspberry Pi Pico y motores paso a paso
 Quadcopter: Evitar obstáculos con Kinect
Quadcopter: Evitar obstáculos con Kinect
 AR Drone Pursuit - Quadrocópter con realidad aumentada
AR Drone Pursuit - Quadrocópter con realidad aumentada
 Cómo posicionar un motor DC con encoder usando Arduino
Cómo posicionar un motor DC con encoder usando Arduino



