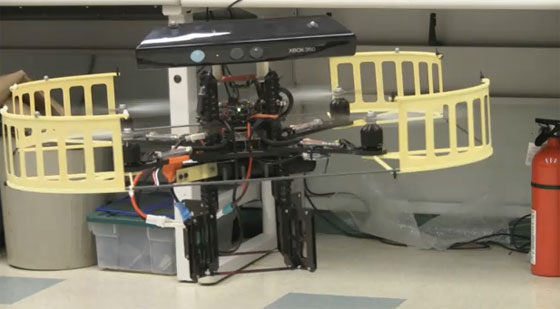
Desde la salida del driver de libre OpenKinect se han visto ya muchas aplicaciones utilizando este maravilloso sensor. Una de sus aplicaciones encuentra lugar aquí, en un proyecto llamado STARMAC del laboratorio de sistemas híbridos de la Universidad de Berkeley en California. Se trata de un pequeño quadcopter que mediante un sensor Kinect es capaz de procesar la imagen y conseguir desplazarse de forma autónoma. Todo el calculo y procesamiento se realiza en el mismo quadcopter mediante una placa base con un procesador Intel Atom 1.6 GHz functionando, como no podía ser de otra forma, con Linux (Ubuntu 10.04).
No os perdais el alucinante video a continuación...
Enlace: Hybrid Systems Lab
En la tienda



 Carrito de bebé motorizado con Kinect
Carrito de bebé motorizado con Kinect
 Intrael: Interfaz HTTP para Kinect
Intrael: Interfaz HTTP para Kinect
 Ajuste PID de un Quadcopter con Maple y Razor 9 DOF
Ajuste PID de un Quadcopter con Maple y Razor 9 DOF
 Glosario del BricoCopter
Glosario del BricoCopter
 Cómo hacer un quadcopter con Arduino
Cómo hacer un quadcopter con Arduino
